–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
[ –°–æ–æ–±—â–µ–Ω–∏–π: 20 ]
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
Prolog
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –Ω–æ—è 25, 2021 11:26:04
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 48
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 06, 2009 18:35:13–°–æ–æ–±—â–µ–Ω–∏–π: 623–û—Ç–∫—É–¥–∞: –ú–æ–ª–¥–∞–≤–∏—è, –ö–∏—à–∏–Ω–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–æ–±—Ä—ã–π –¥–µ–Ω—å. –ò—Å—Ç–æ—Ä–∏—è —Ç–∞–∫–∞—è - –µ—Å—Ç—å —à–≤–µ–π–Ω–∞—è –º–∞—à–∏–Ω–∞ —Å —ç–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–º —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º. –≠–ª–µ–∫—Ç—Ä–æ–¥–≤–∏–≥–∞—Ç–µ–ª—å —Ç—Ä—ë—Ö—Ñ–∞–∑–Ω—ã–π –≤—Ä–∞—â–∞–µ—Ç—Å—è –ø–æ—Å—Ç–æ—è–Ω–Ω–æ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
astrahard
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –Ω–æ—è 25, 2021 11:41:00
–≠—Ç–æ –Ω–µ —Ö–≤–æ—Å—Ç, —ç—Ç–æ –∞–Ω—Ç–µ–Ω–Ω–∞
–ö–∞—Ä–º–∞: -16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -136
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Ñ–µ–≤ 19, 2015 12:41:04–°–æ–æ–±—â–µ–Ω–∏–π: 1405
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–õ—é–±–æ–π —á–∞—Å—Ç–æ—Ç–Ω—ã–π –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª—å –≤—Å–µ —á—Ç–æ –í–∞–º –Ω—É–∂–Ω–æ —É–º–µ–µ—Ç. –î–∞—Ç—á–∏–∫ –æ–±–æ—Ä–æ—Ç–æ–≤ –∑–∞–≤–æ–¥–∏—Ç—å—Å—è –≤ —á–∞—Å—Ç–æ—Ç–Ω–∏–∫ –¥–ª—è —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏–∏ –æ–±–æ—Ä–æ—Ç–æ–≤. –î–∞—Ç—á–∏–∫ —Å –ø–µ–¥–∞–ª–∏ –∫–∞–∫ –∑–∞–¥–∞—Ç—á–∏–∫ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä—É –æ–±–æ—Ä–æ—Ç–æ–≤. –¢–æ—Ä–º–æ–∑ —Å–æ–µ–¥–∏–Ω—è–µ—Ç—Å—è —Å —Å–∏–≥–Ω–∞–ª–æ–º —Ä–µ–∫—É–ø–µ—Ä–∞—Ü–∏–∏. –í—Ä–æ–¥–µ –≤—Å–µ. –û—Å—Ç–∞–ª–∞—Å—å —Ä–µ–≥—É–ª–∏—Ä—É–µ–º–∞—è —ç–ª–µ–∫—Ç—Ä–æ–º—É—Ñ—Ç–∞ –º–æ–∂–Ω–æ –ø–æ–¥–∫–ª—é—á–∏—Ç—å –∫ –≤—ã—Ö–æ–¥—É —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–∞ –∏ –∑–∞–¥–∞—Ç—å —É—Å–ª–æ–≤–∏–µ —Å–∞–º–æ—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ, –Ω–∞–ø—Ä–∏–º–µ—Ä –¥–æ —Ä–∞–∑–≥–æ–Ω–∞ –¥–≤–∏–≥–∞—Ç–µ–ª—è –æ—Ç 0- –¥–æ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö –º–∏–Ω–∏–º–∞–ª—å–Ω—ã—Ö –æ–±–æ—Ä–æ—Ç–æ–≤ (20%) –Ω–µ –≤–∫–ª—é—á–∞—Ç—å, –∏–ª–∏ –≤—ã–∫–ª—é—á–∏—Ç—å –µ—Å–ª–∏ –æ–±–æ—Ä–æ—Ç—ã —É–ø–∞–ª–∏ –º–µ–Ω—å—à–µ 20%. –¢–µ–ø–µ—Ä—å –≤—Å–µ.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
–Ý–æ–¥—ç—Ä–∏–∫
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –Ω–æ—è 25, 2021 15:36:47
–ù–∞—à–µ–ª —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä. –ü–æ–Ω—é—Ö–∞–ª.
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 22
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 26, 2015 23:22:35–°–æ–æ–±—â–µ–Ω–∏–π: 161–û—Ç–∫—É–¥–∞: –Ω–µ —Å –£—Ñ—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–æ–±—Ä—ã–π –¥–µ–Ω—å. –ò—Å—Ç–æ—Ä–∏—è —Ç–∞–∫–∞—è - –µ—Å—Ç—å —à–≤–µ–π–Ω–∞—è –º–∞—à–∏–Ω–∞ —Å —ç–ª–µ–∫—Ç—Ä–æ–Ω–Ω—ã–º —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º. .................. –û–±—ä—è—Å–Ω–∏—Ç–µ –ø–æ–∂–∞–ª—É–π—Å—Ç–∞ (–∂–µ–ª–∞—Ç–µ–ª—å–Ω–æ –ø–æ—à–∞–≥–æ–≤–æ) –∫–∞–∫ –º–æ–∂–Ω–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ.
–ù–µ —Å–æ–≤—Å–µ–º –ø–æ–Ω—è—Ç–Ω–æ, —Ä–æ–¥–Ω–æ–µ "—É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ" –Ω–µ —Ä–∞–±–æ—Ç–∞–µ—Ç —á—Ç–æ-–ª–∏?
–í –ø—Ä–∏–Ω—Ü–∏–ø–µ –º–æ–∂–Ω–æ –≤—ã–∫–∏–Ω—É—Ç—å —ç–ª–µ–∫—Ç—Ä–æ–º—É—Ñ—Ç—ã, —Å–æ–µ–¥–∏–Ω–∏—Ç—å –¥–≤–∏–≥ –Ω–∞–ø—Ä—è–º—É—é –∫ –º–∞—à–∏–Ω–∫–µ –∏ —É–∂–µ —á–µ—Ä–µ–∑ —á–∞—Å—Ç–æ—Ç–Ω–∏–∫ –∫—Ä—É—Ç–∏—Ç—å –¥–≤–∏–≥. –£ –ª—é–±–æ–≥–æ —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–∞ –µ—Å—Ç—å –≤—Ö–æ–¥ –¥–ª—è –ø–æ—Ç–µ–Ω—Ü–∏–æ–º–µ—Ç—Ä–∞ (–ø–µ–¥–∞–ª–∏). –ß–µ–º –±–æ–ª—å—à–µ –Ω–∞–∂–∞–ª, —Ç–µ–º –±—ã—Å—Ç—Ä–µ–µ –∫—Ä—É—Ç–∏—Ç, –æ—Ç–∂–∞–ª - –æ—Å—Ç–∞–Ω–æ–≤–∏–ª–æ—Å—å. –¢–æ—Ä–º–æ–∂–µ–Ω–∏–µ/—Ä–∞–∑–≥–æ–Ω –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞—é—Ç—Å—è –Ω–∞ —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–µ –∫–∞–∫ —É–≥–æ–¥–Ω–æ. –ï—Å–ª–∏ –Ω–µ—Ç –∫–∞–∫–∏—Ö-—Ç–æ –æ—Å–æ–±—ã—Ö —Ç—Ä–µ–±–æ–≤–∞–Ω–∏–π –ø–æ –ø–æ–∑–∏—Ü–∏–æ–Ω–∏—Ä–æ–≤–∞–Ω–∏—é, —Ç–æ –∏ –Ω–∏–∫–∞–∫–∏–µ –¥–∞—Ç—á–∏–∫–∏ —Ç—É—Ç –Ω–µ –Ω—É–∂–Ω—ã.
Tg
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Prolog
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç –Ω–æ—è 25, 2021 19:41:48
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 48
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 06, 2009 18:35:13–°–æ–æ–±—â–µ–Ω–∏–π: 623–û—Ç–∫—É–¥–∞: –ú–æ–ª–¥–∞–≤–∏—è, –ö–∏—à–∏–Ω–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î—É–º–∞–ª –ø—Ä–æ —á–∞—Å—Ç–æ—Ç–Ω–∏–∫, –Ω–æ –ø–æ—Ç–æ–º –æ—Ç–º—ë–ª. –ß–∞—Å—Ç–æ—Ç–Ω–∏–∫ —Å –æ–±—Ä–∞—Ç–Ω–æ–π —Å–≤—è–∑—å—é –ø–æ –∏–º–ø—É–ª—å—Å–∞–º –æ—á–µ–Ω—å –¥–æ—Ä–æ–≥–æ–π, –¥–∞ –∏ –Ω–µ —Å–º–æ–∂–µ—Ç –æ–Ω –ø–æ–ª–Ω–æ—Å—Ç—å—é –≤—ã–ø–æ–ª–Ω—è—Ç—å –≤—Å–µ —Ñ—É–Ω–∫—Ü–∏–∏ –º–∞—à–∏–Ω–∫–∏. –ú–∞—à–∏–Ω–∫–∞ –º–æ–∂–µ—Ç —à–∏—Ç—å —Å —á–∞—Å—Ç–æ—Ç–æ–π –æ—Ç 0,5 —Å—Ç–µ–∂–∫–æ–≤ –≤ —Å–µ–∫—É–Ω–¥—É –¥–æ 50 (–ø–æ–ª–Ω—ã–π –ø—Ä–∏–≤–æ–¥
) –ü—Ä–∏ —ç—Ç–æ–º –∞–±—Å–æ–ª—é—Ç–Ω–æ –∏–¥–µ–∞–ª—å–Ω–æ –ø–æ–¥–¥–µ—Ä–∂–∏–≤–∞–µ—Ç –º–æ—â–Ω–æ—Å—Ç—å, —Ä—É–∫–æ–π –Ω–µ –æ—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –ø—Ä–∏ –ª—é–±—ã—Ö –æ–±–æ—Ä–æ—Ç–∞—Ö. –ï—â—ë –≤ –Ω–µ–π —Ñ–∏—à–∫–∞ - –ø—Ä–∏ –æ—Ç–ø—É—Å–∫–∞–Ω–∏–∏ –ø–µ–¥–∞–ª–∏ –∏–≥–ª–∞ –≤—Å–µ–≥–¥–∞ –æ–ø—É—Å–∫–∞–µ—Ç—Å—è –≤ –Ω–∏–∂–Ω—é—é –º—ë—Ä—Ç–≤—É—é —Ç–æ—á–∫—É, –¥–∞–∂–µ –µ—Å–ª–∏ —Ä–µ–∑–∫–æ –æ—Ç–ø—É—Å—Ç–∏—Ç—å –∫–æ–≥–¥–∞ –∏–≥–ª–∞ –Ω–∞–≤–µ—Ä—Ö—É. –ï—Å–ª–∏ –Ω–∞–¥–∞–≤–∏—Ç—å –Ω–∞ –ø–µ–¥–∞–ª—å "–Ω–∞–∑–∞–¥" –∏–≥–ª–∞ –ø–æ–¥–Ω–∏–º–∞–µ—Ç—Å—è –≤ –≤–µ—Ä—Ö–Ω—é—é –º–µ—Ä—Ç–≤—É—é —Ç–æ—á–∫—É —Ç.–µ. –≤–∞–ª –¥–µ–ª–∞–µ—Ç —Ä–æ–≤–Ω–æ –ø–æ–ª-–æ–±–æ—Ä–æ—Ç–∞.
–Ý–æ–¥—ç—Ä–∏–∫ –ø–∏—Å–∞–ª(–∞):
–ù–µ —Å–æ–≤—Å–µ–º –ø–æ–Ω—è—Ç–Ω–æ, —Ä–æ–¥–Ω–æ–µ "—É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ" –Ω–µ —Ä–∞–±–æ—Ç–∞–µ—Ç —á—Ç–æ-–ª–∏?
.
–Ý–æ–¥–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –Ω–∞—á–∏–Ω–∞–µ—Ç —Ä–∞–±–æ—Ç–∞—Ç—å —Ç–æ–ª—å–∫–æ –∫–æ–≥–¥–∞ —Å–∞–º–æ –∑–∞—Ö–æ—á–µ—Ç, –ø—Ä–∏—á—ë–º –Ω–µ—Ç
–∞–±—Å–æ–ª—é—Ç–Ω–æ –Ω–∏–∫–∞–∫–æ–π –∑–∞–∫–æ–Ω–æ–º–µ—Ä–Ω–æ—Å—Ç–∏. –ú–æ–∂–µ—Ç –ø–æ—Ä–∞–±–æ—Ç–∞—Ç—å 30 —Å–µ–∫—É–Ω–¥, –∞ –º–æ–∂–µ—Ç 2 —á–∞—Å–∞, –Ω–æ –≥–ª—é–∫–∞–Ω—ë—Ç –æ–±—è–∑–∞—Ç–µ–ª—å–Ω–æ. –°—Ä–∞–∑—É —Å–∫–∞–∂—É, —á—Ç–æ –ø–ª–∞—Ç–∞ –ø–æ—á–∏—â–µ–Ω–∞, –ø—Ä–æ–ø–∞—è–Ω–∞, –ø—Ä–æ–∑–≤–æ–Ω–µ–Ω–∞ –∏ –ø—Ä–æ–≤–µ—Ä–µ–Ω–∞ –ø–æ–¥ –º–∏–∫—Ä–æ—Å–∫–æ–ø–æ–º.
–¢–∞–º –≤–Ω—É—Ç—Ä–∏ —Ü–µ–ª—ã–π "–∫–æ–º–ø—å—é—Ç–µ—Ä", –∫—É—á–∞ –ª–æ–≥–∏–∫–∏, –∫–∞–∫–∞—è-—Ç–æ –º–∏–∫—Ä—É—Ö–∞ ROM —Å –æ–∫–æ—à–∫–æ–º –¥–ª—è —Å—Ç–∏—Ä–∞–Ω–∏—è –£–§, –¥–≤–µ "—Å–æ—Ä–æ–∫–æ–Ω–æ–∂–∫–∏" –∏ –¥–æ—Ö—Ä–µ–Ω–∞ —Ä–∞—Å—Å—ã–ø—É—Ö–∏. –ù–∞ –º–∏–∫—Ä—É—Ö–µ —Å –æ–∫–æ—à–∫–æ–º –Ω–∞–¥–ø–∏—Å—å AMD 1979 –≥–æ–¥
. –¢–∞–º –µ—Å—Ç—å –µ—â—ë –∫—É—á–∞ –≤—ã—Ö–æ–¥–æ–≤ –Ω–∞ –ø–Ω–µ–≤–º–∞—Ç–∏–∫—É –¥–ª—è –æ–±—Ä–µ–∑–∫–∏ –Ω–∏—Ç–∫–∏, —Å–º–µ–Ω—ã —à–ø—É–ª—å–∫–∏, —Ä–µ–≤–µ—Ä—Å–∞ –º–∞—Ç–µ—Ä–∏–∞–ª–∞, –æ–≤–µ—Ä–ª–æ–∫–∞ –Ω–æ —ç—Ç–∏ —Ñ—É–Ω–∫—Ü–∏–∏ –Ω–µ –∏—Å–ø–æ–ª—å–∑—É—é—Ç—Å—è –∏ –æ—Ç–∫–ª—é—á–µ–Ω—ã.
–ú—É—Ñ—Ç—ã –Ω–µ –≤—ã–∫–∏–Ω–µ—à—å —Ç.–∫. —ç—Ç–æ —Ü–µ–ª—å–Ω–∞—è —Å–∏—Å—Ç–µ–º–∞ —Å –¥–≤–∏–≥–∞—Ç–µ–ª–µ–º. –ö—Å—Ç–∞—Ç–∏ –º—É—Ñ—Ç—ã —É–ø—Ä–∞–≤–ª—è—é—Ç—Å—è —á–µ—Ä–µ–∑ –ø–æ–ª–µ–≤–∏–∫–∏ –æ—Ç 24–≤.
–ß—Ç–æ-—Ç–æ –º—ã –æ—Ç–æ—à–ª–∏ –æ—Ç —Ç–µ–º—ã. –¢–∞–∫ –∫—Ç–æ-–Ω–∏–±—É–¥—å –ø–æ–¥—Å–∫–∞–∂–µ—Ç –∫–∞–∫ —Ç–æ—á–Ω–æ –∏–∑–º–µ—Ä—è—Ç—å –æ–±–æ—Ä–æ—Ç—ã –ø–æ –∏–º–ø—É–ª—å—Å–∞–º? –ü–æ–¥–æ–∑—Ä–µ–≤–∞—é —á—Ç–æ —á–µ—Ä–µ–∑ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –∏ —Ç–∞–π–º–µ—Ä—ã, –Ω–æ –≤–æ—Ç –∫–∞–∫ —Ç–æ—á–Ω–æ - –•–ó. –ú–Ω–µ –Ω–µ –Ω–∞–¥–æ –ø–∏—Å–∞—Ç—å –≥–æ—Ç–æ–≤—É—é –ø—Ä–æ–≥—Ä–∞–º–º—É. –ü—Ä–æ—Å—Ç–æ —Ä–∞—Å—Å–∫–∞–∂–∏—Ç–µ –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç—å –¥–µ–π—Å—Ç–≤–∏–π –ø—Ä–∏ —Ç–∞–∫–∏—Ö "–≤—ã—á–∏—Å–ª–µ–Ω–∏—è—Ö" —á—Ç–æ–±—ã –≤ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–µ –ø–æ–ª—É—á–∏—Ç—å –∫–∞–∫—É—é –ª–∏–±–æ –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é –∑–∞ –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ –∫–æ—Ä–æ—Ç–∫–∏–π –ø—Ä–æ–º–µ–∂—É—Ç–æ–∫ –≤—Ä–µ–º–µ–Ω–∏.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
astrahard
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 26, 2021 16:22:59
–≠—Ç–æ –Ω–µ —Ö–≤–æ—Å—Ç, —ç—Ç–æ –∞–Ω—Ç–µ–Ω–Ω–∞
–ö–∞—Ä–º–∞: -16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -136
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Ñ–µ–≤ 19, 2015 12:41:04–°–æ–æ–±—â–µ–Ω–∏–π: 1405
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ò–∑–º–µ—Ä—è–µ—Ç–µ –≤—Ä–µ–º—è –º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏, –ø—Ä–æ–π–¥–µ–Ω–Ω—ã–π –ø—É—Ç—å –í–∞–º –∑–∞—Ä–∞–Ω–µ–µ –∏–∑–≤–µ—Å—Ç–µ–Ω. –í–æ—Ç –≤–∞–º –∏ –æ–±–æ—Ä–æ—Ç—ã. –ù–∞–ø—Ä–∏–º–µ—Ä, –∑–∞ –≤—Ä–µ–º—è t (–º—Å) —Å–≤–µ—Ä—à–∏–ª–æ—Å—å –ø–æ–ª–æ–≤–∏–Ω–∞ –æ–±–æ—Ä–æ—Ç–∞, —Ç–æ–≥–¥–∞ –∑–∞ –≤—Ä–µ–º—è 2*t –ø—Ä–æ–∏–∑–æ–π–¥–µ—Ç –ø–æ–ª–Ω—ã–π –æ–±–æ—Ä–æ—Ç. –ê –∑–∞ –≤—Ä–µ–º—è 60—Å–µ–∫ –¥–µ–ª–µ–Ω–Ω–æ–µ –Ω–∞ 2*t (–º–µ–∂–¥—É –∏–º–ø—É–ª—å—Å–∞–º–∏) –¥–∞—Å—Ç –í–∞–º –æ–±/–º–∏–Ω. –ê –µ—Å–ª–∏ –Ω–∞ –æ–±–æ—Ä–æ—Ç 1000 –∏–º–ø—É–ª—å—Å–æ–≤? —Ç–æ–≥–¥–∞ –¥–µ–ª–∏—Ç–µ –Ω–∞ 1000*t
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
musor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 26, 2021 19:50:02
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 7959
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 13, 2014 16:27:32–°–æ–æ–±—â–µ–Ω–∏–π: 39199–û—Ç–∫—É–¥–∞: –°–ø–∏—Ä—Ç–æ–ì–æ–Ω—Å–∫ —Å–æ–∑–≤–µ–∑–¥–∏—è –û–º–µ–≥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∂–µ—Å–∫–∞—è —Å–≤—è–∑—å —Ç–∞–º –Ω–µ –ø—Ä–æ–∫–∞—Ç–∏—Ç...—è –Ω–µ –∑–Ω–∞—é —á—Ç–æ –∑–∞ –º–∞—à–∏–Ω–∞–ø —É —Ç–° –Ω–æ —è –∏–º–µ–ª –¥–µ–ª–∞ —Å—Ç–µ–º–∏ –≥–¥–µ –º–µ—Ö –º—É—Ñ—Ç—ã —Å—á–µ–ø–ª–µ–Ω–∏/—Ç–æ—Ä–º–æ–∑–∞ —Ç—É–ª—è—Ç—Å—è –ø–µ–¥–∞–∞–ª—å—é —á–µ—Ä–µ–∑ —Ç—Ä–æ—Å—ã
Z
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
vlasovzloy
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 26, 2021 22:50:10
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 59
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2218
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —è–Ω–≤ 26, 2012 16:44:29–°–æ–æ–±—â–µ–Ω–∏–π: 19568–û—Ç–∫—É–¥–∞: –¢–∞–∫—Å–∏–º–æ
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–∞—á–Ω–∏ —Å –ø–∏—Ç–∞–Ω–∏—è. –ü—Ä–æ–≤–µ—Ä—å –≤—Å–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –ø—É–ª—å—Å–∞—Ü–∏–∏ –∏ –ø—Ä–æ—á–µ–µ
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
astrahard
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü—Ç –Ω–æ—è 26, 2021 23:10:42
–≠—Ç–æ –Ω–µ —Ö–≤–æ—Å—Ç, —ç—Ç–æ –∞–Ω—Ç–µ–Ω–Ω–∞
–ö–∞—Ä–º–∞: -16
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -136
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Ñ–µ–≤ 19, 2015 12:41:04–°–æ–æ–±—â–µ–Ω–∏–π: 1405
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—Ç–° —Ö–æ—á–µ—Ç –ª–∏—à—å –ø–æ–Ω—è—Ç—å, –∫–∞–∫ —ç—Ç–æ —Ä–∞–±–æ—Ç–∞–µ—Ç, –Ω–∏—á–µ–≥–æ –ø—Ä–µ–¥–ø—Ä–∏–Ω–∏–º–∞—Ç—å —Å–∞–º–æ—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ –Ω–µ –ø–ª–∞–Ω–∏—Ä—É—é—Ç—Å—è –∏ –æ–± —ç—Ç–æ–º –≤—ã—Å–∫–∞–∑–∞–ª—Å—è. –ü–æ–¥–æ–∑—Ä–µ–≤–∞—é, —á—Ç–æ –Ω–∞—á–∞–ª—å–Ω–∏–∫ —Ö–æ—á–µ—Ç –±—ã—Ç—å, –≤–µ—Ä–Ω–µ–µ –Ω–µ —Ö–æ—á–µ—Ç –±—ã—Ç—å –æ–±–º–∞–Ω—É—Ç—ã–º.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Prolog
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –Ω–æ—è 27, 2021 20:27:36
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 48
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 06, 2009 18:35:13–°–æ–æ–±—â–µ–Ω–∏–π: 623–û—Ç–∫—É–¥–∞: –ú–æ–ª–¥–∞–≤–∏—è, –ö–∏—à–∏–Ω–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
musor –ø–∏—Å–∞–ª(–∞):
—è –Ω–µ –∑–Ω–∞—é —á—Ç–æ –∑–∞ –º–∞—à–∏–Ω–∞–ø —É —Ç–°
–ú–∞—à–∏–Ω–∞ –ø—Ä–∏–º–µ—Ä–Ω–æ —Ç–∞–∫–∞—è, –∫–æ–º–ø –∏ –¥–≤–∏–≥–∞—Ç–µ–ª—å —Å –º—É—Ñ—Ç–∞–º–∏ —Ç–æ—á–Ω–æ —Ç–∞–∫–∏–µ-–∂–µ. –¢–∞–º –¥–≤–µ –æ—Ç–¥–µ–ª—å–Ω—ã–µ —ç–ª–µ–∫—Ç—Ä–æ–º—É—Ñ—Ç—ã, —Ç–æ—Ä–º–æ–∑ –∏ "–≥–∞–∑". "–ì–∞–∑" - –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–∏ –∫–æ–ø–∏—è —Å—Ü–µ–ø–ª–µ–Ω–∏—è –æ—Ç –º–∞—à–∏–Ω—ã, —Ç–æ–ª—å–∫–æ –ø—Ä–∏—Ç—è–≥–∏–≤–∞–µ—Ç—Å—è —ç–ª–µ–∫—Ç—Ä–æ–º–∞–≥–Ω–∏—Ç–æ–º.
vlasovzloy –ø–∏—Å–∞–ª(–∞):
–ù–∞—á–Ω–∏ —Å –ø–∏—Ç–∞–Ω–∏—è. –ü—Ä–æ–≤–µ—Ä—å –≤—Å–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –ø—É–ª—å—Å–∞—Ü–∏–∏ –∏ –ø—Ä–æ—á–µ–µ
–í—Å–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è –≤ –Ω–æ—Ä–º–µ, –∞ –≤–æ—Ç –æ—Ç—Å–ª–µ–¥–∏—Ç—å –º–æ–º–µ–Ω—Ç –≥–ª—é–∫–∞ –ø—Ä–æ—Å—Ç–æ –Ω–µ —Ä–µ–∞–ª—å–Ω–æ. –ê–±—Å–æ–ª—é—Ç–Ω–æ –≤ –ª—é–±—É—é —Å–µ–∫—É–Ω–¥—É –ø—Ä–æ—Å—Ç–æ –ø–µ—Ä–µ—Å—Ç–∞—ë—Ç —Ä–µ–∞–≥–∏—Ä–æ–≤–∞—Ç—å –Ω–∞ –ø–µ–¥–∞–ª—å. –ù–∞ –º—É—Ñ—Ç–∞—Ö –ø–æ –Ω—É–ª—è–º. –ù–∞–ø—Ä—è–∂–µ–Ω–∏—è –æ–ø—è—Ç—å-–∂–µ –≤ –Ω–æ—Ä–º–µ. –Ý–∞–±–æ—Ç–∞—Ç—å –Ω–∞—á–∏–Ω–∞–µ—Ç —Ç–∞–∫–∂–µ –∫–æ–≥–¥–∞ –∑–∞—Ö–æ—á–µ—Ç. –£ –º–µ–Ω—è –æ–≥—Ä–æ–º–Ω–æ–µ –ø–æ–¥–æ–∑—Ä–µ–Ω–∏–µ, —á—Ç–æ —ç—Ç–æ –ø—Ä–æ–≥—Ä–∞–º–º–Ω—ã–π –≥–ª—é–∫.
astrahard –ø–∏—Å–∞–ª(–∞):
—Ç–° —Ö–æ—á–µ—Ç –ª–∏—à—å –ø–æ–Ω—è—Ç—å, –∫–∞–∫ —ç—Ç–æ —Ä–∞–±–æ—Ç–∞–µ—Ç, –Ω–∏—á–µ–≥–æ –ø—Ä–µ–¥–ø—Ä–∏–Ω–∏–º–∞—Ç—å —Å–∞–º–æ—Å—Ç–æ—è—Ç–µ–ª—å–Ω–æ –Ω–µ –ø–ª–∞–Ω–∏—Ä—É—é—Ç—Å—è –∏ –æ–± —ç—Ç–æ–º –≤—ã—Å–∫–∞–∑–∞–ª—Å—è. –ü–æ–¥–æ–∑—Ä–µ–≤–∞—é, —á—Ç–æ –Ω–∞—á–∞–ª—å–Ω–∏–∫ —Ö–æ—á–µ—Ç –±—ã—Ç—å, –≤–µ—Ä–Ω–µ–µ –Ω–µ —Ö–æ—á–µ—Ç –±—ã—Ç—å –æ–±–º–∞–Ω—É—Ç—ã–º.
–¢–° –∫–∞–∫ —Ä–∞–∑ –¥—É–º–∞–µ—Ç –∫–∞–∫ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –ø–æ–ª–Ω—ã–π —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª –º–∞—à–∏–Ω–∫–∏ —Ç.–µ. –±—É–¥–µ—Ç –¥–µ–ª–∞—Ç—å –∫–æ–Ω—Ç—Ä–æ–ª–ª–µ—Ä –≤–∑–∞–º–µ–Ω —Å—Ç–∞—Ä–æ–≥–æ
. –Ø-–±—ã –ø—Ä–∏—Ü–µ–ø–∏–ª LM331 –∏–ª–∏ —Ç–∞—Ö–æ–≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä –∏ –∏–∑–º–µ—Ä—è–ª-–±—ã –Ω–∞–ø—Ä—É–≥—É —á–µ—Ä–µ–∑ –ê–¶–ü, –Ω–æ LM331 –¥–æ–ª–≥–æ –∂–¥–∞—Ç—å, —Å —Ç–∞—Ö–æ–≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–æ–º —ç—Ç–æ –∫—É—á–∞ –≤–æ–∑–Ω–∏ —Å –º–µ—Ö–∞–Ω–∏–∫–æ–π, –∞ –º–∞—à–∏–Ω–∫–∞ –Ω—É–∂–Ω–∞ –Ω—É –≤–æ—Ç –ø—Ä—è–º–æ –∑–¥–µ—Å—å –∏ —Å–µ–π—á–∞—Å.
–ü—Ä–æ—Å—Ç–æ –±—ã—Å—Ç—Ä—ã–π —Ä–∞—Å—á—ë—Ç —Å–∫–æ—Ä–æ—Å—Ç–∏ –æ—Ç —á–∞—Å—Ç–æ—Ç—ã –∏–º–ø—É–ª—å—Å–æ–≤ –µ—â—ë –Ω–∏–∫–æ–≥–¥–∞ –Ω–µ —Ä–µ–∞–ª–∏–∑–æ–≤—ã–≤–∞–ª –≤ –ú–ö. –î–µ–ª–∞–ª —Ç–æ–ª—å–∫–æ –ø—Ä–æ—Å—Ç—ã–µ —Ü–∏—Ñ—Ä–æ–≤—ã–µ —Ç–∞—Ö–æ–º–µ—Ç—Ä—ã, –Ω–æ —Ç–∞–º —è –ø–æ–ª—É—á–∞–ª –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é –æ–¥–∏–Ω —Ä–∞–∑ –≤ —Å–µ–∫—É–Ω–¥—É, –∞ –∑–¥–µ—Å—å —Ç–∞–∫–æ–µ –Ω–µ –ø—Ä–æ–∫–∞—Ç–∏—Ç.
–ó.–´. –ü—Ä–æ –Ω–∞—á–∞–ª—å–Ω–∏–∫–∞ –Ω–∞—Å–º–µ—à–∏–ª–∏
(—è —Å–∞–º —Å–µ–±–µ –Ω–∞—á–∞–ª—å–Ω–∏–∫)
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
SSkot
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –Ω–æ—è 27, 2021 22:07:01
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 41
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 2990
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω –∏—é–ª 23, 2018 10:36:20–°–æ–æ–±—â–µ–Ω–∏–π: 3486–û—Ç–∫—É–¥–∞: –ö–∞–∑–∞–Ω—å
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–±—ã–ª–∞ —Ç—É—Ç —Ç–µ–º–∞ –ø—Ä–æ –≤–æ—Å—å–º–∏–∫—Ä—É—Ç, –¥—É–º–∞—é –±—É–¥–µ—Ç –∫ –º–µ—Å—Ç—É.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
korob
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –Ω–æ—è 27, 2021 22:17:10
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 142
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 5961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–≤–≥ 09, 2012 01:09:39–°–æ–æ–±—â–µ–Ω–∏–π: 6642–û—Ç–∫—É–¥–∞: –õ–∏–≤–Ω—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–∞ –Ω–µ –ø–æ–º–æ–∂–µ—Ç –∑–¥–µ—Å—å —á–∞—Å—Ç–æ—Ç–Ω–∏–∫, –¥–∏–Ω–∞–º–∏–∫–∞ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è –±—É–¥–µ—Ç –Ω–µ —Ç–∞.
–ù–µ –∑—Ä—è –∂–µ –≤ –æ—Ä–∏–≥–∞–Ω–∞–ª–µ –º–æ—Ç–æ—Ä –∫—Ä—É—Ç–∏—Ç
–ø–æ—Å—Ç–æ—è–Ω–Ω–æ , —Ä–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏—Å–∫–ª—é—á–∏—Ç–µ–ª—å–Ω–æ –º—É—Ñ—Ç–∞–º–∏. –ò–Ω–∞—á–µ –Ω–∏–∫–∞–∫ –Ω–µ –¥–æ—Å—Ç–∏—á—å –Ω—É–∂–Ω–æ–π –¥–∏–Ω–∞–º–∏–∫–∏ —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è (–Ω—É –µ—Å–ª–∏ —Ç–æ–ª—å–∫–æ –ø—Ä—è–º–æ–π –ø—Ä–∏–≤–æ–¥ BLDC —Å–æ —Å—Ç–∞—Ç–æ—Ä–æ–º –ø–æ–¥ 24 –ø–æ–ª—é—Å–∞
).
Prolog , —è –≤—Å—ë –∂–µ –ø–æ—Å–æ–≤–µ—Ç–æ–≤–∞–ª –±—ã —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è —Å–æ —à—Ç–∞—Ç–Ω—ã–º —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º. –ù–∞ 87,41% —É–≤–µ—Ä–µ–Ω —á—Ç–æ —Å –Ω–∞—Å–∫–æ–∫–∞ (–±–µ–∑ –º–Ω–æ–≥–æ—á–∏—Å–ª–µ–Ω–Ω—ã—Ö —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–æ–≤ –∏ –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–∏–π –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ –º–µ—Ö–∞–Ω–∏–∫–∏ –º–∞—à–∏–Ω–∫–∏) –Ω–∏—á–µ–≥–æ –ø—É—Ç–Ω–æ–≥–æ —Å —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–æ–º –Ω–µ –≤—ã–π–¥–µ—Ç.
–ë–æ–ª—å—à–æ–π –æ–ø—ã—Ç, –ø–æ—Ä–æ–π, –Ω–µ –¥–∞—ë—Ç –Ω–∞—Ö–æ–¥–∏—Ç—å/–≤–∏–¥–µ—Ç—å –Ω–∞–º –ø—Ä–æ—Å—Ç—ã–µ –∏ –æ—á–µ–≤–∏–¥–Ω—ã–µ —Ä–µ—à–µ–Ω–∏—è. –í—Å–µ–≥–¥–∞ —Å —É–≤–∞–∂–µ–Ω–∏–µ–º, –ê–ª–µ–∫—Å–∞–Ω–¥—Ä.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Prolog
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –Ω–æ—è 27, 2021 23:19:17
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 48
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 06, 2009 18:35:13–°–æ–æ–±—â–µ–Ω–∏–π: 623–û—Ç–∫—É–¥–∞: –ú–æ–ª–¥–∞–≤–∏—è, –ö–∏—à–∏–Ω–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
korob –ø–∏—Å–∞–ª(–∞):
Prolog, —è –≤—Å—ë –∂–µ –ø–æ—Å–æ–≤–µ—Ç–æ–≤–∞–ª –±—ã —Ä–∞–∑–æ–±—Ä–∞—Ç—å—Å—è —Å–æ —à—Ç–∞—Ç–Ω—ã–º —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ–º. –ù–∞ 87,41% —É–≤–µ—Ä–µ–Ω —á—Ç–æ —Å –Ω–∞—Å–∫–æ–∫–∞ (–±–µ–∑ –º–Ω–æ–≥–æ—á–∏—Å–ª–µ–Ω–Ω—ã—Ö —ç–∫—Å–ø–µ—Ä–∏–º–µ–Ω—Ç–æ–≤ –∏ –æ–ø—Ä–µ–¥–µ–ª–µ–Ω–∏–π –ø–∞—Ä–∞–º–µ—Ç—Ä–æ–≤ –º–µ—Ö–∞–Ω–∏–∫–∏ –º–∞—à–∏–Ω–∫–∏) –Ω–∏—á–µ–≥–æ –ø—É—Ç–Ω–æ–≥–æ —Å —á–∞—Å—Ç–æ—Ç–Ω–∏–∫–æ–º –Ω–µ –≤—ã–π–¥–µ—Ç.
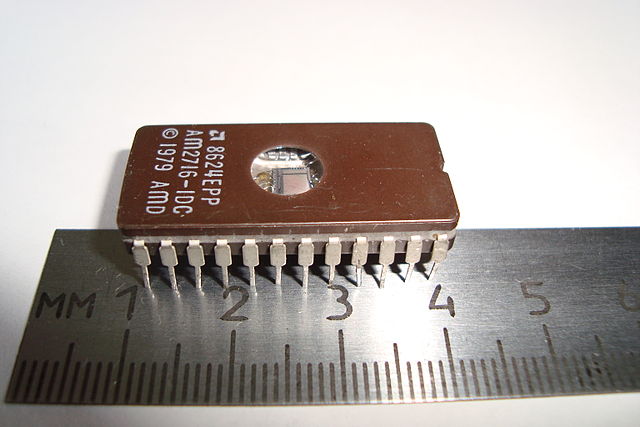
–ë–æ—é—Å—å —à—Ç–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–æ–º–∏—Ä–∞–µ—Ç –∏ —Å–∫–æ—Ä–µ–µ –≤—Å–µ–≥–æ –≤ –ø—Ä–æ–≥—Ä–∞–º–º–Ω–æ–π —á–∞—Å—Ç–∏. –¢–∞–º —Å—Ç–æ–∏—Ç –≤–æ—Ç —Ç–∞–∫–∞—è EPROM
—Å–æ —Å–≤–æ–µ–π –ø—Ä–æ—à–∏–≤–∫–æ–π. –ö–æ–≥–¥–∞ –ø–µ—Ä–≤—ã–π —Ä–∞–∑ –æ—Ç–∫—Ä—ã–ª –∫–æ—Ä–ø—É—Å - –æ–∫–æ—à–∫–æ –Ω–µ –±—ã–ª–æ –∑–∞–∫–ª–µ–µ–Ω–æ –∏ –Ω–∞–∫–ª–µ–π–∫–∏ –≤–Ω—É—Ç—Ä–∏ —Ç–æ–∂–µ –Ω–µ –æ–∫–∞–∑–∞–ª–æ—Å—å. –ë–æ—é—Å—å –¥–æ –º–µ–Ω—è –∫—Ç–æ-—Ç–æ –ø—ã—Ç–∞–ª—Å—è –µ—ë —Ä–µ–º–æ–Ω—Ç–∏—Ä–æ–≤–∞—Ç—å –∏ –≤–æ–∑–º–æ–∂–Ω–æ "–∑–∞—Å–≤–µ—Ç–∏–ª" –∫—Ä–∏—Å—Ç–∞–ª–ª. –ê –º–æ–∂–µ—Ç —É–∂–µ –ø—Ä–æ—Å—Ç–æ –ø–æ–º–∏—Ä–∞–µ—Ç –æ—Ç —Å—Ç–∞—Ä–æ—Å—Ç–∏. –ß–∞—Å—Ç–æ—Ç–Ω–∏–∫ —è –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –Ω–µ –±—É–¥—É. –•–æ—á—É –ø—Ä–æ—Å—Ç–æ –≤–æ—Å—Å—Ç–∞–Ω–æ–≤–∏—Ç—å –ø–æ–ª–Ω—É—é –ª–æ–≥–∏–∫—É —Ä–∞–±–æ—Ç—ã –º–∞—à–∏–Ω–∫–∏ –Ω–æ –Ω–∞ —Å–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–º —Ö–æ—Ä–æ—à–µ–º –ú–ö —Ç.–µ. —Å–æ—Ö—Ä–∞–Ω–∏—Ç—å –≤—Å–µ –º—É—Ñ—Ç—ã, –¥–∞—Ç—á–∏–∫ –∏–º–ø—É–ª—å—Å–æ–≤ –Ω–∞ –≤–∞–ª—É, –∫–æ–Ω—Ü–µ–≤—ã–µ –¥–∞—Ç—á–∏–∫–∏ –∏ —Ç.–¥.
–í–æ—Ç –¥—É–º–∞—é –ø—Ä–æ–∫–∞—Ç–∏—Ç-–ª–∏ —Ç–∞–∫–∞—è —Ñ–∏–≥–Ω—è?
–ó–∞–ø—É—Å–∫–∞–µ–º –≤ –ú–ö —Ç–∞–π–º–µ—Ä —Å–æ —Å—á—ë—Ç—á–∏–∫–æ–º —Å –º–∞–∫—Å–∏–º–∞–ª—å–Ω–æ–π —á–∞—Å—Ç–æ—Ç–æ–π. –ü–æ –≤–Ω–µ—à–Ω–µ–º—É –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—é —Å –¥–∞—Ç—á–∏–∫–∞ –Ω–∞ –≤–∞–ª—É —Å–æ—Ö—Ä–∞–Ω—è–µ–º –ø–µ—Ä–µ–º–µ–Ω–Ω—É—é —Å—á—ë—Ç—á–∏–∫–∞ –∏ –æ–±–Ω—É–ª—è–µ–º –µ–≥–æ. –î–∞–ª—å—à–µ –≤ –ü–ò–î –∏–ª–∏ —Å–∫–æ—Ä–µ–µ –ü–ò —Ä–µ–≥—É–ª—è—Ç–æ—Ä —Å –∫–æ—ç—Ñ—Ñ–∏—Ü–∏–µ–Ω—Ç–∞–º–∏ —Å—Ä–∞–≤–Ω–∏–≤–∞–µ–º —Å –ø–µ—Ä–µ–º–µ–Ω–Ω–æ–π –ø–æ–ª—É—á–µ–Ω–Ω–æ–π —Å –ø–µ–¥–∞–ª–∏ (–ê–¶–ü –∏–ª–∏ –ª–∏–Ω–µ–π–Ω—ã–π –∞–±—Å–æ–ª—é—Ç–Ω—ã–π —ç–Ω–∫–æ–¥–µ—Ä), –∏ –≤—ã–≤–æ–¥–∏–º —á–µ—Ä–µ–∑ –®–ò–ú –Ω–∞ –º—É—Ñ—Ç—É. –¢–æ—Ä–º–æ–∑ –∏ –∫–æ–Ω—Ü–µ–≤—ã–µ —Ç–æ—á–∫–∏ —ç—Ç–æ —É–∂–µ –ø—Ä–æ—Å—Ç–∞—è –ª–æ–≥–∏–∫–∞.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
korob
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± –Ω–æ—è 27, 2021 23:46:27
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 142
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 5961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–≤–≥ 09, 2012 01:09:39–°–æ–æ–±—â–µ–Ω–∏–π: 6642–û—Ç–∫—É–¥–∞: –õ–∏–≤–Ω—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù—É —Ç–∞–∫ –µ—Å–ª–∏ –ø–æ–∫–∞ –µ—â—ë —Å–æ–≤—Å–µ–º –Ω–µ —É–º–µ—Ä–ª–∞ —Å –Ω–µ—ë –º–æ–∂–Ω–æ —Å–Ω—è—Ç—å –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é –∏ –∑–∞–ø–∏—Å–∞—Ç—å –Ω–∞ –Ω–æ–≤—É—é.
P.S –ö–∞–∫ —Å–Ω–∏–º–∞—Ç—å –∏–Ω—Ñ–æ—Ä–º–∞—Ü–∏—é —Å
—É–º–∏—Ä–∞—é—â–∏—Ö (–∏–º–µ–Ω–Ω–æ —É–º–∏—Ä–∞—é—â–∏—Ö, –∞ –Ω–µ —É–º–µ—Ä—à–∏—Ö) —ç—Ç–æ —É–∂–µ –¥—Ä—É–≥–æ–π –≤–æ–ø—Ä–æ—Å, –Ω–æ –æ–Ω —Ä–µ—à–∞–µ—Ç—Å—è.
–ë–æ–ª—å—à–æ–π –æ–ø—ã—Ç, –ø–æ—Ä–æ–π, –Ω–µ –¥–∞—ë—Ç –Ω–∞—Ö–æ–¥–∏—Ç—å/–≤–∏–¥–µ—Ç—å –Ω–∞–º –ø—Ä–æ—Å—Ç—ã–µ –∏ –æ—á–µ–≤–∏–¥–Ω—ã–µ —Ä–µ—à–µ–Ω–∏—è. –í—Å–µ–≥–¥–∞ —Å —É–≤–∞–∂–µ–Ω–∏–µ–º, –ê–ª–µ–∫—Å–∞–Ω–¥—Ä.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
musor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –Ω–æ—è 28, 2021 01:02:20
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 7959
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 13, 2014 16:27:32–°–æ–æ–±—â–µ–Ω–∏–π: 39199–û—Ç–∫—É–¥–∞: –°–ø–∏—Ä—Ç–æ–ì–æ–Ω—Å–∫ —Å–æ–∑–≤–µ–∑–¥–∏—è –û–º–µ–≥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–≤ —Å—Ç–∞—Ä—ã—Ö –ø—Ä–æ–≥–µ—Ä–∞—Ö –≤—Ä–µ–º–µ–Ω 80—Ö –±—ã–ª —Ä–µ–∂–∏–º –¥–æ–ª–≥–æ–π —Å—á–∏—Ç–∫–∏ –ø–æ–∑–≤–æ–ª—è—é—â–∏–π –≤—ã—á–∏—Ç–∞—Ç—å –¥–∞–∂–µ –ø–ª–∞–≤–∞—é—â–∏–µ –±–∏—Ç—ã –ø—Ä–∏ —ç—Ç–æ–º –ø–æ–ª—É—á–∞–ª–æ—Å—å 2 –¥–∞–º–ø–∞ —Å—Ç–∞–±–∏–ª–Ω—ã–π –∏ –Ω–∞–ª–∞–≥–∞–µ–º—ã–π –Ω–∞ –Ω–µ–≥–æ -–ø–ª–∞–≤–∞—é—â–∏–π –¥–∞–ª–µ —É–∂–µ –ø—Ä–∏–¥–µ—Ç—Å—è –æ—á–µ–Ω–∏—Ç—å —á—Ç–æ –∏–∑ –ø–ª–∞–≤–∞—é—â–µ–≥–æ –¥–æ–ª–∂–Ω–æ –ø–ª–∞–≤–∞—Ç –∞ —á—Ç–æ –±—ã—Ç 0 –∏–ª–∏ –µ–¥–∏–Ω–∏—Ü–µ–π
Z
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
korob
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –Ω–æ—è 28, 2021 01:05:38
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 142
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 5961
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –∞–≤–≥ 09, 2012 01:09:39–°–æ–æ–±—â–µ–Ω–∏–π: 6642–û—Ç–∫—É–¥–∞: –õ–∏–≤–Ω—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
musor –ø–∏—Å–∞–ª(–∞):
–±—ã–ª —Ä–µ–∂–∏–º –¥–æ–ª–≥–æ–π —Å—á–∏—Ç–∫–∏ –ø–æ–∑–≤–æ–ª—è—é—â–∏–π –≤—ã—á–∏—Ç–∞—Ç—å –¥–∞–∂–µ –ø–ª–∞–≤–∞—é—â–∏–µ –±–∏—Ç—ã...
–ò–º–µ–Ω–Ω–æ –ø—Ä–æ –Ω–µ–≥–æ –∏ —Ä–µ—á—å.
–ë–æ–ª—å—à–æ–π –æ–ø—ã—Ç, –ø–æ—Ä–æ–π, –Ω–µ –¥–∞—ë—Ç –Ω–∞—Ö–æ–¥–∏—Ç—å/–≤–∏–¥–µ—Ç—å –Ω–∞–º –ø—Ä–æ—Å—Ç—ã–µ –∏ –æ—á–µ–≤–∏–¥–Ω—ã–µ —Ä–µ—à–µ–Ω–∏—è. –í—Å–µ–≥–¥–∞ —Å —É–≤–∞–∂–µ–Ω–∏–µ–º, –ê–ª–µ–∫—Å–∞–Ω–¥—Ä.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
musor
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –Ω–æ—è 28, 2021 01:06:10
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 123
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 7959
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± —Å–µ–Ω 13, 2014 16:27:32–°–æ–æ–±—â–µ–Ω–∏–π: 39199–û—Ç–∫—É–¥–∞: –°–ø–∏—Ä—Ç–æ–ì–æ–Ω—Å–∫ —Å–æ–∑–≤–µ–∑–¥–∏—è –û–º–µ–≥–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
—è —Ç–æ–∂–µ –∫–∞–∏ korob , —Å—á–∏—Ç–∞—é—á—Ç–æ —Å–æ–∑–¥–∞—Ç—å —É–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Å—Ç–∞–Ω–∫–æ–º —Å 0 –Ω–µ –∏–º–µ—è –Ω–∞—Ä–∞–±–æ—Ç–æ–∫ –ø–æ—á—Ç–∏ –Ω–µ—Ä–µ–∞–ª–Ω–æ
Z
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–æ–¥—ç—Ä–∏–∫
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –Ω–æ—è 28, 2021 16:03:38
–ù–∞—à–µ–ª —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä. –ü–æ–Ω—é—Ö–∞–ª.
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 22
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 26, 2015 23:22:35–°–æ–æ–±—â–µ–Ω–∏–π: 161–û—Ç–∫—É–¥–∞: –Ω–µ —Å –£—Ñ—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
....... –Ω–æ –Ω–∞ —Å–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–º —Ö–æ—Ä–æ—à–µ–º –ú–ö
–ù—É —Ö–æ—Ç—å —á—Ç–æ-—Ç–æ –±—É–¥–µ—Ç —Å–æ–≤—Ä–µ–º–µ–Ω–Ω—ã–º..... –ü—Ä–∞–≤–¥–∞ –Ω–µ –≤—Å–µ –æ—Ü–µ–Ω—è—Ç —Ç–∞–∫–æ–π –ø–æ–¥—Ö–æ–¥, –∫—Ç–æ-—Ç–æ –º–æ–∂–µ—Ç —Å–∫–∞–∑–∞—Ç—å: "–Ω–µ –∑—Ä—è –∂–µ —Ç—É–¥–∞ –ø–æ—Å—Ç–∞–≤–∏–ª–∏ –¥—Ä–µ–≤–Ω–∏–π –º–∫ ...."
–ß—Ç–æ –∫–∞—Å–∞–µ—Ç—Å—è "–ø—Ä–æ–∫–∞—Ç–∏—Ç –ª–∏ —Ç–∞–∫–∞—è —Ñ–∏–≥–Ω—è" - –ª–µ–≥–∫–æ –ø—Ä–æ–∫–∞—Ç–∏—Ç. –¢—É—Ç –≤–∞–∂–Ω–µ–µ, —á—Ç–æ–±—ã —Ñ–∏–≥–Ω—è —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤–æ–≤–∞–ª–∞ –∑–∞–¥–∞—á–µ, –±—ã–ª–∞ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–æ–º –µ—ë –ø–æ–ª–Ω–æ–≥–æ –ø–æ–Ω–∏–º–∞–Ω–∏—è. –¢—ã –≥–æ–≤–æ—Ä–∏—à—å, —á—Ç–æ —Ö–æ—á–µ—à—å –∏–∑–º–µ—Ä—è—Ç—å –æ–±–æ—Ä–æ—Ç—ã. –•–æ—Ä–æ—à–æ, –¥–æ–ø—É—Å—Ç–∏–º –∏–∑–º–µ—Ä–∏–ª. –ò –Ω–∞ —á—Ç–æ (–∏ –∫–∞–∫) —ç—Ç–æ –¥–æ–ª–∂–Ω–æ –≤–ª–∏—è—Ç—å, –µ—Å—Ç—å –ø–æ–Ω–∏–º–∞–Ω–∏–µ?
Tg
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Prolog
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å –Ω–æ—è 28, 2021 16:43:39
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 48
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 06, 2009 18:35:13–°–æ–æ–±—â–µ–Ω–∏–π: 623–û—Ç–∫—É–¥–∞: –ú–æ–ª–¥–∞–≤–∏—è, –ö–∏—à–∏–Ω–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü–æ–Ω–∏–º–∞–Ω–∏–µ –∫–∞–∫ —Ä–∞–∑ –µ—Å—Ç—å. –£–∂–µ –Ω–µ —Ä–∞–∑ –¥–µ–ª–∞–ª —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ç–æ—Ä—ã –æ–±–æ—Ä–æ—Ç–æ–≤ –Ω–∞ –ú–ö, –Ω–æ —Ç–æ–ª—å–∫–æ –≤—Å–µ–≥–¥–∞ –ø–æ–ª—É—á–∞–ª–æ—Å—å, —á—Ç–æ –æ–±–æ—Ä–æ—Ç—ã –∏–∑–º–µ—Ä—è–ª–∏—Å—å –≤–≤–∏–¥–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏—è (—Å —Ç–∞—Ö–æ–≥–µ–Ω–µ—Ä–∞—Ç–æ—Ä–∞ –∏–ª–∏ –æ—Ç—Ä–∞–∂—ë–Ω–Ω–æ–µ –Ω–∞–ø—Ä—è–∂–µ–Ω–∏–µ —è–∫–æ—Ä—è). –õ–æ–≥–∏–∫–∞ —Ä–∞–±–æ—Ç—ã-—Ç–æ –Ω–∞ —Å–∞–º–æ–º –¥–µ–ª–µ –ø—Ä–æ—Å—Ç–∞—è. –ï—Å–ª–∏ –Ω–µ –≤–¥–∞–≤–∞—Ç—å—Å—è –≤ –ø–æ–¥—Ä–æ–±–Ω–æ—Å—Ç–∏ –≤—ã—á–∏—Å–ª–µ–Ω–∏–π —Ç–æ –ø–æ–ª—É—á–∞–µ—Ç—Å—è - –±–µ—Ä—ë–º –∑–Ω–∞—á–µ–Ω–∏–µ —Å –ø–µ–¥–∞–ª–∏, –±–µ—Ä—ë–º –∑–Ω–∞—á–µ–Ω–∏–µ —Å –≤–∞–ª–∞ –º–∞—à–∏–Ω–∫–∏, —Å—Ä–∞–≤–Ω–∏–≤–∞–µ–º –∏—Ö –∏ –≤ –∑–∞–≤–∏—Å–∏–º–æ—Å—Ç–∏ –æ—Ç –ø–æ–ª—É—á–µ–Ω–Ω–æ–≥–æ —Ä–µ–∑—É–ª—å—Ç–∞—Ç–∞ —É—Å–∏–ª–∏–≤–∞–µ–º –∏–ª–∏ —É–º–µ–Ω—å—à–∞–µ–º –ø—Ä–∏–∂–∏–º –º—É—Ñ—Ç—ã. –§—Å—ë! –ü–æ —Å—É—Ç–∏ –ø—Ä–æ–ø–æ—Ä—Ü–∏–æ–Ω–∞–ª—å–Ω—ã–π —Ä–µ–≥—É–ª—è—Ç–æ—Ä.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–æ–¥—ç—Ä–∏–∫
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –Ω–æ—è 29, 2021 12:10:26
–ù–∞—à–µ–ª —Ç—Ä–∞–Ω–∑–∏—Å—Ç–æ—Ä. –ü–æ–Ω—é—Ö–∞–ª.
–ö–∞—Ä–º–∞: 1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 22
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç –Ω–æ—è 26, 2015 23:22:35–°–æ–æ–±—â–µ–Ω–∏–π: 161–û—Ç–∫—É–¥–∞: –Ω–µ —Å –£—Ñ—ã
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–∞—Å–∫–æ–ª—å–∫–æ —è –ø–æ–Ω—è–ª —Ç–≤–æ–π –æ—Å–Ω–æ–≤–Ω–æ–π –≤–æ–ø—Ä–æ—Å –≤ —ç—Ç–æ–º:
....
–ù–∞—Å–∫–æ–ª—å–∫–æ? –≤ —Ü–∏—Ñ—Ä–∞—Ö.
–û–¥–∏–Ω –∏–∑ –≤–∞—Ä–∏–∞–Ω—Ç–æ–≤ –¥–ª—è —Ç–µ–±—è –º–æ–≥ –±—ã –≤—ã–≥–ª—è–¥–µ—Ç—å —Ç–∞–∫: –∑–∞–ø—É—Å–∫–∞–µ—à—å —Ç–∞–π–º–µ—Ä –Ω–∞ 125–º—Å –∏ –ø–æ –∫–∞–∂–¥–æ–º—É –µ–≥–æ –ø–µ—Ä–µ–∑–∞–ø—É—Å–∫—É —Å–º–æ—Ç—Ä–∏—à—å —Å–∫–æ–ª—å–∫–æ –ø–µ—Ä–∏–æ–¥–æ–≤ –Ω–∞–∫–æ–ø–∏–ª–æ—Å—å –∑–∞ —ç—Ç–æ –≤—Ä–µ–º—è.
–ù–æ –ø—Ä–∏ —Ç–∞–∫–æ–º –º–µ—Ç–æ–¥–µ –∏–Ω—Ñ—É –ø–æ –æ–±–æ—Ä–æ—Ç–∞–º —Ç—ã –±—É–¥–µ—à—å –ø–æ–ª—É—á–∞—Ç—å —Å –∑–∞–¥–µ—Ä–∂–∫–æ–π –≤ —Ç–µ —Å–∞–º—ã–µ 125–º—Å. –≠—Ç–æ –≤—Ä–µ–º—è –º–æ–∂–Ω–æ —É–º–µ–Ω—å—à–∏—Ç—å –∏ –∑–∞–æ–¥–Ω–æ —É–ª—É—á—à–∏—Ç—å —Ä–µ–∞–∫—Ü–∏—é –Ω–∞ –∏–∑–º–µ–Ω–µ–Ω–∏–µ, –∑–∞–ø—É—Å—Ç–∏–≤ –ø–∞—Ä–∞–ª–ª–µ–ª—å–Ω–æ –Ω–µ—Å–∫–æ–ª—å–∫–æ —Ç–∞–∫–∏—Ö —Ç–∞–π–º–µ—Ä–æ–≤ —Å–æ —Å–¥–≤–∏–≥–æ–º –Ω–∞—á–∞–ª–∞ –æ—Ç—Å—á—ë—Ç–∞. –¢–æ –µ—Å—Ç—å –±—É–¥–µ—à—å —Ä–∞—Å–ø–ª–∞—á–∏–≤–∞—Ç—å—Å—è –æ–ø–µ—Ä–∞—Ç–∏–≤–æ–π –∑–∞ –±—ã—Å—Ç—Ä–æ—Ç—É.
Tg
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Prolog
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –Ý–µ–≥—É–ª–∏—Ä–æ–≤–∫–∞ –∏ —Å—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏—è –æ–±–æ—Ä–æ—Ç–æ–≤
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –Ω–æ—è 29, 2021 14:37:29
–í—ã–º–æ–≥–∞—Ç–µ–ª—å –ø—Ä–∏–ø–æ—è
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 48
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –æ–∫—Ç 06, 2009 18:35:13–°–æ–æ–±—â–µ–Ω–∏–π: 623–û—Ç–∫—É–¥–∞: –ú–æ–ª–¥–∞–≤–∏—è, –ö–∏—à–∏–Ω–µ–≤
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–û–æ–æ.. –°–ø–∞—Å–∏–±–æ —Ç–µ–±–µ –¥–æ–±—Ä—ã–π —á–µ–ª–æ–≤–µ–∫
!
–ë—É–¥—É –ø–æ—Ç–∏—Ö–æ–Ω—å–∫—É –ø—Ä–æ–µ–∫—Ç–∏—Ä–æ–≤–∞—Ç—å. –î—É–º–∞—é –æ–∫–æ–ª–æ 100–º—Å —Ç–∞–π–º–µ—Ä–∞ –¥–æ–ª–∂–Ω–æ —Ö–≤–∞—Ç–∏—Ç—å —Å —Ç–∞–∫–∏–º —Ä–∞–∑—Ä–µ—à–µ–Ω–∏–µ–º –¥–∞—Ç—á–∏–∫–∞ –∏–º–ø—É–ª—å—Å–æ–≤.
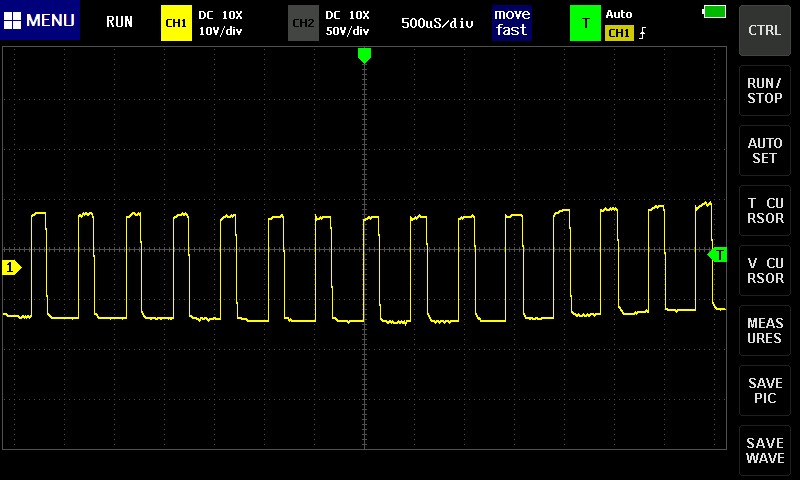
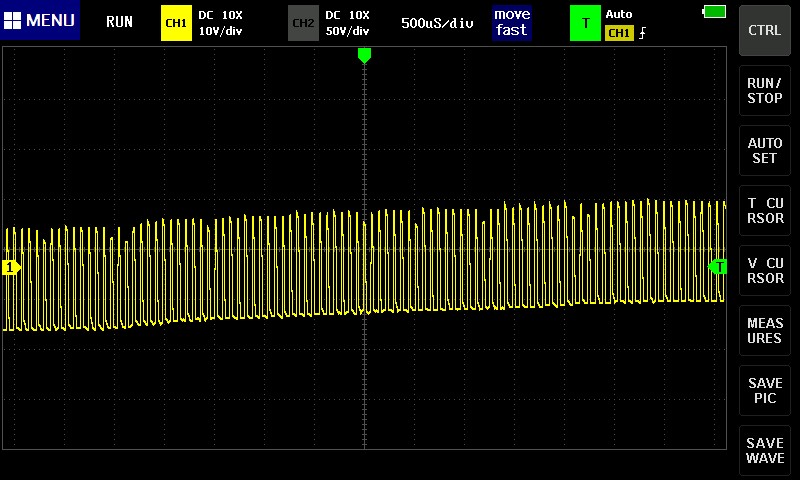
–ö—Å—Ç–∞—Ç–∏ –≤–æ—Ç –æ—Å—Ü–∏–ª–ª–æ–≥—Ä–∞–º–º—ã —Å –º—É—Ñ—Ç—ã (–ø–æ–π–º–∞–ª –º–æ–º–µ–Ω—Ç –∫–æ–≥–¥–∞ –æ–Ω–∞ –∑–∞—Ä–∞–±–æ—Ç–∞–ª–∞).
–ü–æ—Ö–æ–∂–µ, —á—Ç–æ –ß–ò–ú.
–ö–æ–º—É –∏–Ω—Ç–µ—Ä–µ—Å–Ω–æ –≤–æ—Ç –µ—â—ë —Ñ–æ—Ç–æ–∫ —Å–¥–µ–ª–∞–ª.
–ê –≤–æ—Ç –∏ —Å–∞–º –¥–∞—Ç—á–∏–∫, —Å—Ç–æ—è—â–∏–π –Ω–∞ –≤–∞–ª—É –º–∞—à–∏–Ω–∫–∏.
–ü–æ–∫–∞ —á—Ç–æ –∑–∞—Å—Ç–∞–≤–∏–ª —Ä–∞–±–æ—Ç–∞—Ç—å –¥–µ–Ω–¥—Ä–æ—Ñ–µ–∫–∞–ª—å–Ω—ã–º –º–µ—Ç–æ–¥–æ–º. –ù–µ –æ—á–µ–Ω—å —É–¥–æ–±–Ω–æ, –Ω–æ —Ö–æ—Ç—å –∫–∞–∫-—Ç–æ –Ω–∞–¥–æ —Ä–∞–±–æ—Ç–∞—Ç—å –ø–æ–∫–∞ —Ä–∞–∑–±–∏—Ä–∞—é—Å—å. –ü–æ–Ω–∏–∂–∞–π–∫–∞ –Ω–∞ XL4016 –ø—Ä—è–º–æ –Ω–∞ –º—É—Ñ—Ç—É –∏ –≤–Ω–µ—à–Ω–∏–π –ø–æ–ª–∑—É–Ω–∫–æ–≤—ã–π —Ä–µ–∑–∏—Å—Ç–æ—Ä –Ω–∞ –ø–µ–¥–∞–ª—å. –ö–∞–∫ –Ω–∏ —Å—Ç—Ä–∞–Ω–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç, –∏–∑ —á–µ–≥–æ –¥–µ–ª–∞—é –≤—ã–≤–æ–¥, —á—Ç–æ –º—É—Ñ—Ç–∞ –æ—á–µ–Ω—å –Ω–µ–ø—Ä–∏—Ö–æ—Ç–ª–∏–≤–∞ –∏ –®–ò–ú –µ–π —Ç–æ–∂–µ –ø–æ–Ω—Ä–∞–≤–∏—Ç—Å—è. –ù–æ –¥–µ–Ω–¥—Ä–æ—Ñ–µ–∫–∞–ª—å–Ω—ã–π –æ–Ω –Ω–∞ —Ç–æ –∏ –¥–µ–Ω–¥—Ä–æ—Ñ–µ–∫–∞–ª—å–Ω—ã–π... –°—Ç–∞–±–∏–ª–∏–∑–∞—Ü–∏–∏ –æ–±–æ—Ä–æ—Ç–æ–≤ –Ω–µ—Ç, –∫–∞–∫ –∏ –ø–æ–¥–¥–µ—Ä–∂–∫–∏ –º–æ—â–Ω–æ—Å—Ç–∏ –Ω–∞ –≤–∞–ª—É. –¢–æ—Ä–º–æ–∑ –Ω–µ —Ä–∞–±–æ—Ç–∞–µ—Ç, —Ç–æ—Ä–º–æ–∑–∏—Ç –ø–æ –∏–Ω–µ—Ä—Ü–∏–∏ (–ø–∞—Ä–∞ —Å—Ç–µ–∂–∫–æ–≤). –ù–µ—Ç –ø–æ–¥–Ω—è—Ç–∏—è –∏ –æ–ø—É—Å–∫–∞–Ω–∏—è –∏–≥–ª—ã –≤ –º—ë—Ä—Ç–≤—ã–µ —Ç–æ—á–∫–∏. –¢–∞–∫ —á—Ç–æ –ø–æ–∫–∞ —Ç–∞–∫.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 1
[ –°–æ–æ–±—â–µ–Ω–∏–π: 20 ]
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 17
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è


















 !
!