|
–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
 
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 2
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 37 ] |
, |
| –ê–≤—Ç–æ—Ä |
–°–æ–æ–±—â–µ–Ω–∏–µ |
DmitryR

|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞  –î–æ–±–∞–≤–ª–µ–Ω–æ: –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –æ–∫—Ç 10, 2022 07:48:30 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–î–æ–±—Ä—ã–π –¥–µ–Ω—å, –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ —Å—Ñ–æ—Ä–º–∏—Ä–æ–≤–∞—Ç—å —Å–∏–≥–Ω–∞–ª (–∫–∞–∫ –Ω–∞ –ø—Ä–∏–ª–æ–∂–µ–Ω–Ω–æ–º —Ä–∏—Å—É–Ω–∫–µ) –Ω–∞ –ø–∏–Ω–µ –º–∫ –æ—Ç –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è. –¢.–µ. –ø–æ —Å–æ–±—ã—Ç–∏—é EXTI –∫–∞–∂–¥—ã–π —Ä–∞–∑ –Ω–∞ –ø–∏–Ω–µ —Ñ–æ—Ä–º–∏—Ä—É–µ—Ç—Å—è —Å–∏–≥–Ω–∞–ª –ø–æ—Å—Ç–æ—è–Ω–Ω–æ–π —Ñ–æ—Ä–º—ã (50–º–∫—Å–µ–∫ –≤—ã—Å–æ–∫–∏–π —É—Ä–æ–≤–µ–Ω—å, 50 - –Ω–∏–∑–∫–∏–π, 500 - –≤—ã—Å–æ–∫–∏–π –∏ –ø–æ—Ç–æ–º –Ω–∏–∑–∫–∏–π –¥–æ —Å–ª–µ–¥—É—é—â–µ–≥–æ EXTI).
–ü—Ä–æ–≥—Ä–∞–º–º–Ω–æ —ç—Ç–æ —Å–¥–µ–ª–∞—Ç—å –Ω–µ –ø—Ä–æ–±–ª–µ–º–∞, –∑–∞–≤–µ—Å—Ç–∏ —Ç–∞–π–º–µ—Ä –∏ –≤ –µ–≥–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö –ø–µ—Ä–µ–∫–ª—é—á–∞—Ç—å –ø–∏–Ω. –ù–æ —Ö–æ—Ç–µ–ª–æ—Å—å –±—ã —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —ç—Ç–æ –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ. –¢–∞–∫ –∏ –≤—Ä–µ–º–µ–Ω–Ω—ã–µ –ø—Ä–æ–º–µ–∂—É—Ç–∫–∏ –±—É–¥—É—Ç –ø–æ—Ç–æ—á–Ω–µ–µ –∏ –≤—Ä–µ–º—è —Å—Ä–∞–±–∞—Ç—ã–≤–∞–Ω–∏—è.
–ö–∞–∫ —ç—Ç–æ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —è –ø–æ–∫–∞ –Ω–µ –ø—Ä–µ–¥—Å—Ç–∞–≤–ª—è—é. –í —Å–∞–º–æ–º —Å–∏–≥–Ω–∞–ª–µ —Å–∞–º—ã–º –≤–∞–∂–Ω—ã–º —è–≤–ª—è–µ—Ç—Å—è –ø–µ—Ä–≤—ã–π –ø—Ä–æ–º–µ–∂—É—Ç–æ–∫ 50 –º–∫ —Å–µ–∫ –∏ –Ω–∞—á–∞–ª–æ –µ–≥–æ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–Ω–∏—è. –ú–æ–∂–Ω–æ –±—ã–ª–æ –±—ã –≤–∫–ª—é—á–∏—Ç—å –æ–¥–∏–Ω –∏–∑ —Ç–∞–π–º–µ—Ä–æ–≤ –≤ —Ä–µ–∂–∏–º–µ One Pulse Mode, –æ–Ω –±—ã –æ—Ç—Ä–∞–±–æ—Ç–∞–ª –ø–µ—Ä–≤—ã–µ 50 –º–∫—Å–µ–∫, –∞ –¥–∞–ª—å—à–µ –≤—Ç–æ—Ä—ã–º —Ç–∞–π–º–µ—Ä–æ–º –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ –ø–µ—Ä–µ–∫–ª—é—á–∞—Ç—å –æ—Å—Ç–∞–≤—à–∏–µ—Å—è –ø—Ä–æ–º–µ–∂—É—Ç–∫–∏, –Ω–æ –ø—Ä–∏ –Ω–∞—Å—Ç—Ä–æ–π–∫–µ –ø–∏–Ω–∞ –≤ —Ä–µ–∂–∏–º –æ–¥–∏–Ω–æ—á–Ω–æ–≥–æ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–Ω–∏—è PWM –≤ –¥–∞–ª—å–Ω–µ–π—à–µ–º —É –º–µ–Ω—è –Ω–µ –ø–æ–ª—É—á–∞–µ—Ç—Å—è –º–µ–Ω—è—Ç—å –µ–≥–æ —Å–æ—Å—Ç–æ—è–Ω–∏–µ, —Ç.–µ. –æ—Ç—Ä–∞–±–æ—Ç–∞–ª –æ–Ω –∏–º–ø—É–ª—å—Å, –ø–µ—Ä–µ—à–µ–ª –≤ LOW –∏ –ø–µ—Ä–µ–≤–µ—Å—Ç–∏ –µ–≥–æ –≤ HIGH –≤—Ä—É—á–Ω—É—é —É–∂–µ –Ω–µ –ø–æ–ª—É—á–∞–µ—Ç—Å—è.
–ï—Å—Ç—å –ª–∏ —Ç—É—Ç –∫–∞–∫–∏–µ-–ª–∏–±–æ –≤–∞—Ä–∏–∞–Ω—Ç—ã –∏–ª–∏ –∂–µ —Ç–æ–ª—å–∫–æ –ø–µ—Ä–µ–∫–ª—é—á–∞—Ç—å –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö –æ—Ç —Ç–∞–π–º–µ—Ä–∞?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
 |
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Eddy_Em
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –æ–∫—Ç 10, 2022 09:16:45 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: -12
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -24
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∏—é–ª 12, 2019 22:52:01
–°–æ–æ–±—â–µ–Ω–∏–π: 2516
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
OPM режим с прерыванием по UEV: в прерывании EXTI запускаешь таймер, он дает тебе два первых импульса. Затем перенастраиваешь в прерывании UEV на 500мкс, опять запускаешь, уже отключив прерывание UEV. Тольког 50мкс - маловато, из-за накладных расходов второй импульс будет больше (но можно экспериментально определить нужные настройки, а прерыванию UEV поставить наивысший приоритет). Еще более разумный вариант — запусить передачу при помощи DMA, пусть он в CC1/ARR и пишет нужные значения. Тогда проблемы с длительностью будут минимальными. Вот так, например. В конкретном случае нет нужды ни CC1, ни ARR дергать: можно прескалером поиграться.
_________________
Linux rules! Windows must die. –ó–¥—Ä–∞–≤–æ–º—ã—Å–ª—è—â–∏–π —á–µ–ª–æ–≤–µ–∫ –¥–æ–±—Ä–æ–≤–æ–ª—å–Ω–æ –±—É–¥–µ—Ç –ø–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è –º–∞—Å—Ç–¥–∞–µ–º –ª–∏—à—å –≤ –¥–≤—É—Ö —Å–ª—É—á–∞—è—Ö: –ø–æ–¥ –¥—É–ª–æ–º –∞–≤—Ç–æ–º–∞—Ç–∞ –∏–ª–∏ –ø–æ–¥ –≤–ª–∏—è–Ω–∏–µ–º –∞–Ω–∞–ª—å–Ω–æ–≥–æ –∑–æ–Ω–¥–∞.
–Ø –Ω–∞ –≥–∏—Ç—Ö–∞–±–µ, –≤ –ñ–ñ
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
azhel12
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –æ–∫—Ç 10, 2022 10:04:43 |
|
| –í—Å—Ç–∞–ª –Ω–∞ –ª–∞–ø—ã |
 |
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü–Ω –∞–ø—Ä 02, 2012 15:56:23
–°–æ–æ–±—â–µ–Ω–∏–π: 144
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ò–Ω—Ç–µ—Ä–µ—Å–Ω–∞—è –∑–∞–¥–∞—á–∫–∞, –∞ —á—Ç–æ –µ—Å–ª–∏ —Ç–∞–∫–æ–π –≤–∞—Ä–∏–∞–Ω—Ç –ø—Ä–∏–∫–∏–Ω—É—Ç—å (–∫–æ–Ω–µ—á–Ω–æ, —Ä–∞—Å—Ö–æ–¥ —Ç–∞–π–º–µ—Ä–æ–≤ –±–æ–ª—å—à–æ–π, –Ω–æ –∏—Ö –≤—Ä–æ–¥–µ –∫–∞–∫ –º–Ω–æ–≥–æ): –æ–±—ä–µ–¥–∏–Ω–∏—Ç—å –≤—ã—Ö–æ–¥ –¥–≤—É—Ö —Ç–∞–π–º–µ—Ä–æ–≤, –ø–µ—Ä–≤—ã–π –Ω–∞—Å—Ç—Ä–æ–∏—Ç—å –Ω–∞ –¥–≤–æ–π–Ω–æ–π OPM (–ø—Ä–æ–¥–≤–∏–Ω—É—Ç—ã–µ —Ç–∞–∫ —É–º–µ—é—Ç) –∏ –ø–µ—Ä–∏–æ–¥ –≤ 50–º–∫—Å, –≤—Ç–æ—Ä–æ–π —Å–¥–µ–ª–∞—Ç—å —Å–ª–µ–π–≤–æ–º —Å –¥–µ–ª–µ–Ω–∏–µ–º –Ω–∞ 2 –∏ —Ç–æ–∂–µ OPM, —Ç–æ–≥–¥–∞ –Ω–∞ –≤—Ç–æ—Ä–æ–π –ø–µ—Ä–µ—Ö–æ–¥ –ø–µ—Ä–≤–æ–≥–æ —Ç–∞–π–º–µ—Ä–∞ –∑–∞–ø—É—Å—Ç–∏—Ç—Å—è –≤—Ç–æ—Ä–æ–π, —Ç–æ –µ—Å—Ç—å –≤–æ–æ–±—â–µ –Ω–∏—á–µ–≥–æ –∏–∑–º–µ–Ω—è—Ç—å –Ω–µ –Ω–∞–¥–æ?
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
DmitryR
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω –æ–∫—Ç 10, 2022 14:43:55 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Eddy_Em, Цитата: OPM режим с прерыванием по UEV: в прерывании EXTI запускаешь таймер, он дает тебе два первых импульса. Затем перенастраиваешь в прерывании UEV на 500мкс, опять запускаешь, уже отключив прерывание UEV. Идея понятна, но смущает ручной запуск таймера в EXTI ..., ну ладно, как вариант. Но вопрос, если пин настроен как OPM таймера, то менять состояние этого пина по ходу программы я не могу? Цитата: Еще более разумный вариант — запусить передачу при помощи DMA, пусть он в CC1/ARR и пишет нужные значения. Тогда проблемы с длительностью будут минимальными. Мне кажется вызов DMA или в прерывании перезаписать CC1/ARR примерно то на то и выйдет? Тут еще минус в том, что сейчас таймер срабатывает от EXTI автоматически, а если делать на перезапуске в прерываниях, то придется перенастраивать на программный запуск таймера, что скорее всего скажется на времени старта первого импульса azhel12, Цитата: объединить выход двух таймеров А разве так можно делать? Я чет даже не знаю...
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
jcxz
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –æ–∫—Ç 11, 2022 01:07:55 |
|
| –ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º |
–ö–∞—Ä–º–∞: -7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 187
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–≤–≥ 15, 2017 10:51:13
–°–æ–æ–±—â–µ–Ω–∏–π: 1658
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–ù–æ —Ö–æ—Ç–µ–ª–æ—Å—å –±—ã —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å —ç—Ç–æ –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ. –í —á—ë–º –ø—Ä–æ–±–ª–µ–º–∞? –ë–µ—Ä—ë–º XMC4500 –∏–ª–∏ XMC4700 –∏–ª–∏ XMC4800. –í–Ω–µ—à–Ω–∏–π —Å–∏–≥–Ω–∞–ª –∑–∞–≤–æ–¥–∏–º –Ω–∞ –≤—Ö–æ–¥ –ª—é–±–æ–≥–æ —Ç–∞–π–º–µ—Ä–∞ (CCU). –ù–∞ —ç—Ç–æ—Ç –≤—Ö–æ–¥ –ø—Ä–æ–≥—Ä–∞–º–º–∏—Ä—É–µ–º —Ñ—É–Ω–∫—Ü–∏—é –∑–∞–ø—É—Å–∫–∞ —Ç–∞–π–º–µ—Ä–∞ (–ø–æ –Ω—É–∂–Ω–æ–º—É —Å–æ–±—ã—Ç–∏—é: —Ñ—Ä–æ–Ω—Ç/—Å–ø–∞–¥/—Ñ—Ä–æ–Ω—Ç_–∏–ª–∏_—Å–ø–∞–¥). –ü–∞—Å—Å–∏–≤–Ω—ã–π —É—Ä–æ–≤–µ–Ω—å –≤—ã—Ö–æ–¥–∞ —Ç–∞–π–º–µ—Ä–∞ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ–º = LOW. –¢–∞–π–º–µ—Ä –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞–µ–º –≤ —Ä–µ–∂–∏–º PWM: –ø–µ—Ä–∏–æ–¥ = 100–º–∫—Å, –¥–ª–∏–Ω–∞ –∏–º–ø—É–ª—å—Å–∞ =50–º–∫—Å. –¢–∞–∫–∂–µ –≤–Ω—É—Ç—Ä–∏ —ç—Ç–æ–≥–æ –ø–µ—Ä–∏–æ–¥–∞ –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞–µ–º –≥–µ–Ω–µ—Ä–∞—Ü–∏—é –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è, –≤ ISR –∫–æ—Ç–æ—Ä–æ–≥–æ –±—É–¥–µ–º –ø—Ä–æ–∏–∑–≤–æ–¥–∏—Ç—å –∑–∞–ø–∏—Å—å –Ω–æ–≤—ã—Ö –ø–µ—Ä–∏–æ–¥–∞/–¥–ª–∏–Ω—ã_–∏–º–ø—É–ª—å—Å–∞ –≤ —Ç–µ–Ω–µ–≤—ã–µ —Ä–µ–≥–∏—Å—Ç—Ä—ã. –í–æ 2-–º –≤—Ö–æ–¥–µ –≤ ISR –Ω–∞—Å—Ç—Ä–æ–∏–º –Ω–æ–≤–æ–µ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ –Ω–∞ —Ç–æ—á–∫—É 500–º–∫—Å –æ—Ç –Ω–∞—á–∞–ª–∞ 2-–≥–æ –ø–µ—Ä–∏–æ–¥–∞. –í 3-–º –≤—Ö–æ–¥–µ –≤ ISR - –≤—ã–∫–ª—é—á–∏–º —Ç–∞–π–º–µ—Ä. –í—Å—ë! –í—Å–µ –∏–Ω—Ç–µ—Ä–≤–∞–ª—ã –±—É–¥—É—Ç –≤—ã–¥–µ—Ä–∂–∞–Ω—ã —Å —Ç–æ—á–Ω–æ—Å—Ç—å—é –¥–æ —Ç–∞–∫—Ç–∞ CPU, —Ç–∞–∫ –∫–∞–∫ –Ω–∏ –æ–¥–∏–Ω –Ω–µ –∑–∞–≤–∏—Å–∏—Ç –æ—Ç –∑–∞–¥–µ—Ä–∂–µ–∫ –≤—ã–ø–æ–ª–Ω–µ–Ω–∏—è CPU/DMA. PS: –ï—Å–ª–∏ —Å–∏–ª—å–Ω–æ –Ω—É–∂–Ω–æ, —Ç–æ –æ–ø–µ—Ä–∞—Ü–∏–∏ –ø—Ä–æ–∏–∑–≤–æ–¥–∏–º—ã–µ –≤ ISR, –º–æ–∂–Ω–æ –∑–∞–º–µ–Ω–∏—Ç—å –Ω–∞ DMA (–Ω–∞–ø—Ä–∞–≤–∏–≤ —Å–∏–≥–Ω–∞–ª—ã –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –Ω–∞ –ª–∏–Ω–∏–∏ DMA-–∑–∞–ø—Ä–æ—Å–æ–≤). PPS: –ê –µ—Å–ª–∏ –µ—â—ë –Ω–µ–º–Ω–æ–≥–æ –ø–æ–¥—É–º–∞—Ç—å –∏ –Ω–µ–º–Ω–æ–≥–æ –¥–æ—Ä–∞–±–æ—Ç–∞—Ç—å –∞–ª–≥–æ—Ä–∏—Ç–º, —Ç–æ –¥–∞–∂–µ —Ü–µ–ª—ã–π CCU –Ω–µ –Ω—É–∂–µ–Ω, –º–æ–∂–Ω–æ –æ–±–æ–π—Ç–∏—Å—å –µ–≥–æ 1/4 —á–∞—Å—Ç—å—é.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
Andrey_B
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –æ–∫—Ç 11, 2022 09:47:45 |
|
| –≠–ª–µ–∫—Ç—Ä–∏—á–µ—Å–∫–∏–π –∫–æ—Ç |
 |
–ö–∞—Ä–º–∞: 14
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 383
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∞–ø—Ä 09, 2010 16:06:38
–°–æ–æ–±—â–µ–Ω–∏–π: 1062
–û—Ç–∫—É–¥–∞: –¢—É–ª–∞
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 1
|
–ï—Å—Ç—å –ª–∏ —Ç—É—Ç –∫–∞–∫–∏–µ-–ª–∏–±–æ –≤–∞—Ä–∏–∞–Ω—Ç—ã –∏–ª–∏ –∂–µ —Ç–æ–ª—å–∫–æ –ø–µ—Ä–µ–∫–ª—é—á–∞—Ç—å –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è—Ö –æ—Ç —Ç–∞–π–º–µ—Ä–∞? –ü–æ–ø—Ä–æ–±—É–π—Ç–µ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –Ω–µ —Ç–∞–π–º–µ—Ä, –∞ –º–æ–¥—É–ª—å SPI. –í–∞—à —Å–∏–≥–Ω–∞–ª, —ç—Ç–æ 12-–±–∏—Ç–Ω–æ–µ —Å–ª–æ–≤–æ 0b101111111111 –Ω–∞ —Å–∫–æ—Ä–æ—Å—Ç–∏ 20kbps.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
DmitryR
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –æ–∫—Ç 11, 2022 11:53:54 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
jcxz, –í–∞—à–∞ –∏–¥–µ—è –º–Ω–µ –Ω—Ä–∞–≤–∏—Ç—Å—è, —è –¥–∞–∂–µ –Ω–µ –∑–Ω–∞–ª, —á—Ç–æ –≤ —Ä–µ–∂–∏–º–µ PWM –º–æ–∂–Ω–æ –≥–µ–Ω–µ—Ä–∏—Ä–æ–≤–∞—Ç—å –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è. –¢–æ–ª—å–∫–æ –ø–æ–∫–∞ —Å —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–µ–π –Ω–µ –ø–æ–ª—É—á–∏–ª–æ—Å—å. –ò—Å–ø–æ–ª—å–∑—É—é stm32f7 –∏ –∏–∑-–∑–∞ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö —Å–æ–æ–±—Ä–∞–∂–µ–Ω–∏–π –Ω–∞—Å—Ç—Ä–æ–π–∫—É –¥–µ–ª–∞—é –Ω–∞ HAL –í main –∑–∞–ø—É—Å–∫–∞—é: –ö–æ–¥: HAL_TIM_PWM_Start_IT(&htim3, TIM_CHANNEL_4);
State = 1;
–í –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ –º–µ–Ω—è—é CCR –∏ ARR: –ö–æ–¥: void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
switch (State)
{
case 1:
TIM3->CCR4 = 24999;
TIM3->ARR = 49999;
TIM3->EGR = TIM_EGR_UG;
State++;
break;
case 2:
TIM3->CCR4 = 4999;
TIM3->ARR = 9999;
TIM3->EGR = TIM_EGR_UG;
HAL_TIM_PWM_Stop_IT(&htim3, TIM_CHANNEL_4);
State = 1;
break;
default:
__NOP();
}
}
}
–ï—Å–ª–∏ —è –Ω–µ –æ—à–∏–±–∞—é—Å—å, —Ç–æ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ –≥–µ–Ω–µ—Ä–∏—Ä—É–µ—Ç—Å—è –ø–æ –¥–æ—Å—Ç–∏–∂–µ–Ω–∏—é —Å—á–µ—Ç–∞ ARR, –ø–æ—ç—Ç–æ–º—É –≤ case 1 –º–µ–Ω—è—é –∑–Ω–∞—á–µ–Ω–∏—è ARR –∏ CCR –Ω–∞ –±–æ–ª–µ–µ –¥–ª–∏—Ç–µ–ª—å–Ω—ã–µ, —Ç.–µ. –Ω–∞ —ç—Ç–æ—Ç –º–æ–º–µ–Ω—Ç —É –º–µ–Ω—è —É–∂–µ 2 —Ç–∞–π–º–∏–Ω–≥–∞ –ø–æ 50 –º–∫—Å–µ–∫ –¥–æ–ª–∂–Ω–æ –æ—Ç—Ä–∞–±–æ—Ç–∞—Ç—å. –î–∞–ª—å—à–µ –æ—Ç—Ä–∞–±–∞—Ç—ã–≤–∞—é—Ç –Ω–æ–≤—ã–µ ARR –∏ CCR, –≥–µ–Ω–µ—Ä–∏—Ä—É–µ—Ç—Å—è –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ –∏ –≤ case 2 —è –≤–æ–∑–≤—Ä–∞—â–∞—é –ø—Ä–æ—à–ª—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è –∏ –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é PWM. –ù–æ —á—Ç–æ-—Ç–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –Ω–µ —Ç–∞–∫ PWM –Ω–∞—Å—Ç—Ä–æ–µ–Ω –Ω–∞ –∑–∞–ø—É—Å–∫ –æ—Ç EXTI
| –í–ª–æ–∂–µ–Ω–∏—è: |
 2.png [30.4 KiB]
2.png [30.4 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 77
|
1.png [30.28 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 74
|
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
>TEHb<
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –æ–∫—Ç 11, 2022 13:01:20 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 17
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 467
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 11, 2009 17:19:30
–°–æ–æ–±—â–µ–Ω–∏–π: 5570
–û—Ç–∫—É–¥–∞: –í–æ—Ä–æ–Ω–µ–∂
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
F7 —Ä–∞–∑–Ω—ã–µ –±—ã–≤–∞—é—Ç. –ö–∞–∫–∞—è –º–æ–¥–µ–ª—å?
_________________
"–ü—Ä–∏–≤–µ—Ç!" - —Å–æ–≤—Ä–∞–ª –æ–Ω.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
DmitryR
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –æ–∫—Ç 11, 2022 13:03:01 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
–Ý–µ–∫–ª–∞–º–∞
|
|
|
|
|
|
|
|
|
|
>TEHb<
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –æ–∫—Ç 11, 2022 15:52:03 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 17
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 467
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 11, 2009 17:19:30
–°–æ–æ–±—â–µ–Ω–∏–π: 5570
–û—Ç–∫—É–¥–∞: –í–æ—Ä–æ–Ω–µ–∂
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–í–æ—Ç —Å–æ–±–∞–∫–∞, –æ–Ω –±–µ–∑ HRTIM! –¢–æ–≥–¥–∞ –∫–∞–∫ –≤–∞—Ä–∏–∞–Ω—Ç –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å Eddy_Em –ø–∏—Å–∞–ª(–∞): –∑–∞–ø—É—Å–∏—Ç—å –ø–µ—Ä–µ–¥–∞—á—É –ø—Ä–∏ –ø–æ–º–æ—â–∏ DMA, –ø—É—Å—Ç—å –æ–Ω –≤ CC1/ARR –∏ –ø–∏—à–µ—Ç –Ω—É–∂–Ω—ã–µ –∑–Ω–∞—á–µ–Ω–∏—è. –í–∫–ª—é—á–∏—Ç—å –±—É—Ñ–µ—Ä–∏–∑–∞—Ü–∏—é —Ä–µ–≥–∏—Å—Ç—Ä–æ–≤ –∏ —Å—Ä–∞–∑—É –ø–æ—Å–ª–µ –∑–∞–ø—É—Å–∫–∞ –æ—Ç –≤–Ω–µ—à–Ω–µ–≥–æ —Å–æ–±—ã—Ç–∏—è –∑–∞–ø–∏—Ö–∏–≤–∞—Ç—å –º–æ–¥—É–ª–µ–º –ü–î–ü –≤ —Ä–µ–≥–∏—Å—Ç—Ä—ã –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –¥–ª—è –≤—Ç–æ—Ä–æ–≥–æ –∏–º–ø—É–ª—å—Å–∞. –ö–∞–∫ —Ç–æ–ª—å–∫–æ—Ç–∞–π–º–µ—Ä –æ—Ç—Ä–∞–±–æ—Ç–∞–µ—Ç –ø–µ—Ä–≤—ã–π –∏–º–ø—É–ª—å—Å, —Ç–æ –∑–Ω–∞—á–µ–Ω–∏—è –æ–±–Ω–æ–≤—è—Ç—Å—è –∏ –ø–æ–ª–µ—Ç–∏—Ç –≤—Ç–æ—Ä–æ–π –∏–º–ø—É–ª—å—Å. –í–µ—Ä–æ—è—Ç–Ω–æ (–Ω–µ —á–∏—Ç–∞–ª —Ç–∞–∫ –ø–æ–¥—Ä–æ–±–Ω–æ) –º–æ–∂–Ω–æ —É—Å—Ç—Ä–æ–∏—Ç—å –≤—Å—ë —Ç–∞–∫, —á—Ç–æ–±—ã —Ç–æ—Ç –∂–µ –ü–î–ü –≤–æ –≤—Ä–µ–º—è –≤—Ç–æ—Ä–æ–≥–æ –∏–º–ø—É–ª—å—Å–∞ –≤–æ–∑–≤—Ä–∞—â–∞–ª –≤—Å—ë –Ω–∞ –∫—Ä—É–≥–∏ —Å–≤–æ—è. –í —ç—Ç–æ–º —Å–ª—É—á–∞–µ —è–¥—Ä–æ –Ω–µ –±—É–¥–µ—Ç –æ—Ç–≤–ª–µ–∫–∞—Ç—å—Å—è –≤–æ–æ–±—â–µ. –ö–∞–∫ –≤—Å—ë —ç—Ç–æ –Ω–∞—Å—Ç—Ä–∞–∏–≤–∞—Ç—å –Ω–∞–ø–∏—Å–∞–Ω–æ –≤ –¥–æ–∫—É–º–µ–Ω—Ç–µ RM0385 –Ω–∞ —Å—Ç—Ä–∞–Ω–∏—Ü–µ 786.
_________________
"–ü—Ä–∏–≤–µ—Ç!" - —Å–æ–≤—Ä–∞–ª –æ–Ω.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
jcxz
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç –æ–∫—Ç 11, 2022 22:42:12 |
|
| –ì–æ–≤–æ—Ä—è—â–∏–π —Å —Ç–µ–∫—Å—Ç–æ–ª–∏—Ç–æ–º |
–ö–∞—Ä–º–∞: -7
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 187
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–≤–≥ 15, 2017 10:51:13
–°–æ–æ–±—â–µ–Ω–∏–π: 1658
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
jcxz, –í–∞—à–∞ –∏–¥–µ—è –º–Ω–µ –Ω—Ä–∞–≤–∏—Ç—Å—è, —è –¥–∞–∂–µ –Ω–µ –∑–Ω–∞–ª, —á—Ç–æ –≤ —Ä–µ–∂–∏–º–µ PWM –º–æ–∂–Ω–æ –≥–µ–Ω–µ—Ä–∏—Ä–æ–≤–∞—Ç—å –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è. –£ —Ç–∞–π–º–µ—Ä–æ–≤ XMC —Ä–µ–≥–∏—Å—Ç—Ä —Å—Ä–∞–≤–Ω–µ–Ω–∏—è (–∫–æ—Ç–æ—Ä—ã–π –æ–ø—Ä–µ–¥–µ–ª—è–µ—Ç —Ç–æ—á–∫—É –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –≤—ã—Ö–æ–¥–∞ PWM) —Ç–æ—á–Ω–æ —Ç–∞–∫–∂–µ –º–æ–∂–µ—Ç –Ω–∞ —ç—Ç–æ–º –∂–µ –∑–Ω–∞—á–µ–Ω–∏–∏ –≤—ã–∑—ã–≤–∞—Ç—å –≥–µ–Ω–µ—Ä–∞—Ü–∏—é –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è (–µ—Å–ª–∏ —Å–æ–æ—Ç–≤–µ—Ç—Å—Ç–≤—É—é—â–∏–π –±–∏—Ç —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è —É—Å—Ç–∞–Ω–æ–≤–ª–µ–Ω), –ª–∏–±–æ –º–æ–∂–Ω–æ –æ—Ç–¥–µ–ª—å–Ω–æ —Ä–∞–∑—Ä–µ—à–∏—Ç—å –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –≤ –∫–æ–Ω—Ü–µ –∏/–∏–ª–∏ –≤ —Å–µ—Ä–µ–¥–∏–Ω–µ –ø–µ—Ä–∏–æ–¥–∞ PWM (–¥–ª—è —ç—Ç–æ–≥–æ —Ä–µ–≥–∏—Å—Ç—Ä —Å—Ä–∞–≤–Ω–µ–Ω–∏—è –Ω–µ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è). –ê –µ—Å–ª–∏ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å —Ç–∞–π–º–µ—Ä —Å –¥–≤—É–º—è CR (—Ä–µ–≥–∏—Å—Ç—Ä–∞–º–∏ —Å—Ä–∞–≤–Ω–µ–Ω–∏—è), —Ç–æ –º–æ–∂–Ω–æ –æ–¥–Ω–∏–º CR –∑–∞–¥–∞—Ç—å —Ç–æ—á–∫—É –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –≤—ã—Ö–æ–¥–∞ PWM, –∞ –≤—Ç–æ—Ä—ã–º CR - —Ç–æ—á–∫—É –≥–µ–Ω–µ—Ä–∞—Ü–∏–∏ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –≤ –ø—Ä–æ–∏–∑–≤–æ–ª—å–Ω–æ–º –º–µ—Å—Ç–µ –ø–µ—Ä–∏–æ–¥–∞ (–Ω–∏–∫–∞–∫ –Ω–µ –ø—Ä–∏–≤—è–∑–∞–Ω–Ω–æ–º –∫ –º–æ–º–µ–Ω—Ç–∞–º –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –≤—ã—Ö–æ–¥–∞ PWM). –ò—Ç–æ–≥–æ: –æ–¥–∏–Ω CCU8 (—Ç–∞–π–º–µ—Ä —Å –¥–≤—É–º—è —Ä–µ–≥–∏—Å—Ç—Ä–∞–º–∏ —Å—Ä–∞–≤–Ω–µ–Ω–∏—è) –ø–æ–∑–≤–æ–ª—è–µ—Ç –≥–µ–Ω–µ—Ä–∏—Ä–æ–≤–∞—Ç—å –¥–æ 6-—Ç–∏ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –Ω–∞ –ø–µ—Ä–∏–æ–¥ –≤ —Ä–∞–∑–Ω—ã—Ö —Ç–æ—á–∫–∞—Ö –ø–µ—Ä–∏–æ–¥–∞: –Ω–∞—á–∞–ª–µ/–∫–æ–Ω—Ü–µ, –≤ —Å–µ—Ä–µ–¥–∏–Ω–µ, –ø–æ 1-–º—É CR –ø—Ä–∏ —Å—á—ë—Ç–µ –≤–≤–µ—Ä—Ö –∏ –ø—Ä–∏ —Å—á—ë—Ç–µ –≤–Ω–∏–∑, –∏ —Ç–æ –∂–µ —Å–∞–º–æ–µ - –ø–æ 2-–º—É CR. –î–ª—è —ç—Ç–∏—Ö 6 –∏—Å—Ç–æ—á–Ω–∏–∫–æ–≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–π –º–æ–∂–Ω–æ –Ω–∞–∑–Ω–∞—á–∏—Ç—å –¥–æ –¥–≤—É—Ö —Ä–∞–∑–Ω—ã—Ö —Å–∏–≥–Ω–∞–ª–æ–≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –∫ NVIC. –≠—Ç–æ –Ω–µ —Å—á–∏—Ç–∞—è —Ç–æ–≥–æ, —á—Ç–æ –¥–ª—è –º–Ω–æ–≥–∏—Ö —Å–æ–±—ã—Ç–∏–π —Ç–∞–π–º–µ—Ä–∞ (—Å—Ç–∞—Ä—Ç –∏–ª–∏ —Å—Ç–æ–ø, –∑–∞—Ö–≤–∞—Ç, —Å–∏–≥–Ω–∞–ª —Ä–∞–∑—Ä–µ—à–µ–Ω–∏—è —Ç–∞–∫—Ç–∏—Ä–æ–≤–∞–Ω–∏—è, –∏–∑–º–µ–Ω–µ–Ω–∏—è –Ω–∞–ø—Ä–∞–≤–ª–µ–Ω–∏—è —Å—á—ë—Ç–∞, –ø–µ—Ä–µ–∑–∞–≥—Ä—É–∑–∫–∞ –∏ –¥—Ä.) –µ—Å–ª–∏ –æ–Ω–∏ –≤—ã–∑—ã–≤–∞—é—Ç—Å—è –≤–Ω–µ—à–Ω–∏–º–∏ —Å–∏–≥–Ω–∞–ª–∞–º–∏, —Ç–æ –ø–æ –Ω–∏–º —Ç–æ–∂–µ —Ç–∞–π–º–µ—Ä –º–æ–∂–µ—Ç –¥–æ–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω–æ –≥–µ–Ω–µ—Ä–∏—Ç—å –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏—è –ø–æ –Ω–∞–∑–Ω–∞—á–µ–Ω–Ω—ã–º –ª–∏–Ω–∏—è–º NVIC.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
DmitryR
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 13:47:42 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
>TEHb<, jcxz, –í–∞—à–∏ –¥–≤–∞ —Å–æ–≤–µ—Ç–∞ –≤ —Ü–µ–ª–æ–º –ø–æ—Ö–æ–∂–∏ –∏ –≤ —Ü–µ–ª–æ–º –æ–Ω–∏ —Ä–∞–±–æ—Ç–∞—é—Ç. –ù–∞—Å—Ç—Ä–æ–∏—Ç—å PWM –Ω–∞ –∑–∞–ø—É—Å–∫ –æ—Ç EXTI –∏ –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏ –æ—Ç —Ç–∞–π–º–µ—Ä–∞ –º–µ–Ω—è—Ç—å ARR –∏ CCR, –¥–∞–ª—å—à–µ –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—Ç—å —Ç–∞–π–º–µ—Ä, –≤–æ–∑–≤—Ä–∞—â–∞—Ç—å ARR –∏ CCR –Ω–∞ –º–µ—Å—Ç–æ –∏ —Ä–∞–∑—Ä–µ—à–∞—Ç—å –ø–æ–≤—Ç–æ—Ä–Ω–æ–µ —Å—Ä–∞–±–∞—Ç—ã–≤–∞–Ω–∏–µ –ø–æ —Å–ª–µ–¥—É—é—â–µ–º—É EXTI. –û–¥–Ω–∞ —Ç–æ–ª—å–∫–æ –ø—Ä–æ–±–ª–µ–º–∞ —Å —ç—Ç–∏–º: –∫–∞–∫ —Ç–æ–ª—å–∫–æ –æ—Ç—Ä–∞–±–∞—Ç—ã–≤–∞—é—Ç –≤—Å–µ 3 —Ç–∞–π–º–∏–Ω–≥–∞ (50, 50 –∏ 500 –º–∫—Å–µ–∫), –≤—ã—Å—Ç–∞–≤–ª—è–µ–º –Ω–∏–∑–∫–∏–π —É—Ä–æ–≤–µ–Ω—å –∏ –ø—Ä–∏ —Å–ª–µ–¥—É—é—â–µ–º EXTI —É –Ω–∞—Å –ø–µ—Ä–≤—ã–µ 50 –º–∫ —Å–µ–∫ –æ–ø—è—Ç—å –¥–æ–ª–∂–Ω—ã –±—ã—Ç—å HIGH, –Ω–æ –æ–Ω–∏ –±—É–¥—É—Ç LOW, –∏ –∏–∑-–∑–∞ —ç—Ç–æ–≥–æ –≤—Å–µ —É—Ä–æ–≤–Ω–∏ –ø–æ–º–µ–Ω—è—é—Ç—Å—è –º–µ—Å—Ç–∞–º–∏ –∏ —Ç–∞–∫ –±—É–¥–µ—Ç –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç—å —Ü–∏–∫–ª–∏—á–Ω–æ –î–æ–±–∞–≤–ª–µ–Ω–æ after 2 minutes 27 seconds:–ö–æ–¥: if(htim->Instance == TIM2)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_4); // WorkTest
switch (State)
{
case 1:
State++;
break;
case 2:
TIM2->CCR4 = 50000 - 1;
TIM2->ARR = 50000 - 1;
TIM2->EGR = TIM_EGR_UG;
State++;
break;
case 3:
HAL_TIM_OC_Stop_IT(&htim2, TIM_CHANNEL_4);
TIM2->CCR4 = 5000 - 1;
TIM2->ARR = 5000 - 1;
TIM2->EGR = TIM_EGR_UG;
HAL_TIM_OC_Start_IT(&htim2, TIM_CHANNEL_4);
State = 1;
break;
default:
__NOP();
}
}
–ù—É –∏ –ø–æ—á–µ–º—É-—Ç–æ –ø—Ä–∞–≤–∏–ª—å–Ω—ã–µ —Ç–∞–π–º–∏–Ω–≥–∏ –≤—ã—Å—Ç–∞–≤–ª—è—é—Ç—Å—è –ø—Ä–∏ ARR = 5000 –∏ CCR = 5000; –Ø –∫–∞–Ω–∞–ª –Ω–∞—Å—Ç—Ä–æ–∏–ª –∫–∞–∫ output compare CH, –Ω–æ —Å PWM –ø–æ-–º–æ–µ–º—É —Ç–æ –∂–µ —Å–∞–º–æ–µ
| –í–ª–æ–∂–µ–Ω–∏—è: |
3.png [19.64 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 55
|
2.png [23.13 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 56
|
1.png [21.91 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 54
|
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
>TEHb<
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 13:50:21 |
|
| –î—Ä—É–≥ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 17
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 467
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –Ω–æ—è 11, 2009 17:19:30
–°–æ–æ–±—â–µ–Ω–∏–π: 5570
–û—Ç–∫—É–¥–∞: –í–æ—Ä–æ–Ω–µ–∂
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ó–Ω–∞—á–∏—Ç —É –≤–∞—Å –Ω–µ–≤–µ—Ä–Ω–æ –Ω–∞—Å—Ç—Ä–æ–µ–Ω —Ç–∞–π–º–µ—Ä. –ù–∞—Å—Ç—Ä–∞–∏–≤–∞–π—Ç–µ –æ–¥–Ω–æ–∑–Ω–∞—á–Ω–æ –≤ –∫–∞–∫–æ–π —Ç–æ—á–∫–µ —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—Ç—å –≤—ã—Å–æ–∫–∏–π —É—Ä–æ–≤–µ–Ω—å, –∞ –≤ –∫–∞–∫–æ–π –Ω–∏–∑–∫–∏–π. –ù–∏–∫–∞–∫–∏—Ö –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏–π, —Ç–æ–ª—å–∫–æ –∂—ë—Å—Ç–∫–æ –≤–≤–µ—Ä—Ö –∏–ª–∏ –≤–Ω–∏–∑.
–ù—É –∏ —è –≤—Å—ë-—Ç–∞–∫–∏ –ø—Ä–µ–¥–ª–∞–≥–∞–ª —Å –ø–æ–º–æ—â—å—é DMA —Ä–∞—Å—Å–æ–≤—ã–≤–∞—Ç—å –¥–∞–Ω–Ω—ã–µ –≤ —Ä–µ–≥–∏—Å—Ç—Ä—ã, –∞ –Ω–µ –≤ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–∏.
_________________
"–ü—Ä–∏–≤–µ—Ç!" - —Å–æ–≤—Ä–∞–ª –æ–Ω.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Eddy_Em
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 14:08:47 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: -12
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -24
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∏—é–ª 12, 2019 22:52:01
–°–æ–æ–±—â–µ–Ω–∏–π: 2516
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
DmitryR, –ø—Ä–µ–¥–ª–∞–≥–∞—é –¥–ª—è –Ω–∞—á–∞–ª–∞ –æ—Ç –∫–∞–ª–∞ –æ—Ç–∫–∞–∑–∞—Ç—å—Å—è. –í—Å–µ —Ä–∞–≤–Ω–æ –≤–µ–¥—å —á–∞—Å—Ç—å –≤–µ—â–µ–π –¥–µ–ª–∞–µ—Ç—Å—è –Ω–∞–ø—Ä—è–º—É—é —Ä–µ–≥–∏—Å—Ç—Ä–∞–º–∏!
–ù—É –∏ –µ—â–µ —Ä–∞–∑ –Ω–∞–ø–æ–º–Ω—é –æ DMA. –ê —Ç–∞–∫–∂–µ, –≤–∏–¥–∏–º–æ, –º–∏–º–æ –ø—Ä–æ–ª–µ—Ç–µ–ª–æ: –±—ã–ª–æ –∂–µ –ø—Ä–µ–¥–ª–æ–∂–µ–Ω–∏–µ SPI –∏–ª–∏ I2C –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å, —á—Ç–æ–±—ã –¥–∞–Ω–Ω—É—é –ø–æ—Å–ª–µ–¥–æ–≤–∞—Ç–µ–ª—å–Ω–æ—Å—Ç—å –∏–º–ø—É–ª—å—Å–æ–≤ –≤–æ—Å–ø—Ä–æ–∏–∑–≤–µ—Å—Ç–∏.
P.S. А код реально жуткий. Дрыгать ногодрыгом в прерывании от таймера, когда можно напрямую в ШИМ-режиме… Да еще и ты учти, что есть приличные накладные расходы на вход в прерывание и исполнение кода в нем. Таким образом честных 50мкс ты никак не получишь. Кстати, каловская HAL_GPIO_TogglePin - это тебе не макрос и даже не true_inline, а самая настоящая функция со всеми вытекающими!\
–ï—Å–ª–∏ —Ç–µ–±–µ —Ç–∞–∫ —Ö–æ—á–µ—Ç—Å—è –∫–∞–ª–∞, —Ç–æ –Ω–∞–ø–∏—à–∏ –Ω–∞ –°++ —Å —à–∞–±–ª–æ–Ω–∞–º–∏ —Å–≤–æ—é –æ–±–µ—Ä—Ç–∫—É, –∏ –±—É–¥–µ—Ç —Ç–µ–±–µ —â–∞—Å—Å—å–µ. –¢–∞–∫ –∫–∞–∫ –º–∏–Ω–∏–º—É–º –ø–∞—Ä–∞ —á–µ–ª–æ–≤–µ–∫ —Å —Ñ–æ—Ä—É–º–∞ –¥–µ–ª–∞–ª–∞.
_________________
Linux rules! Windows must die. –ó–¥—Ä–∞–≤–æ–º—ã—Å–ª—è—â–∏–π —á–µ–ª–æ–≤–µ–∫ –¥–æ–±—Ä–æ–≤–æ–ª—å–Ω–æ –±—É–¥–µ—Ç –ø–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è –º–∞—Å—Ç–¥–∞–µ–º –ª–∏—à—å –≤ –¥–≤—É—Ö —Å–ª—É—á–∞—è—Ö: –ø–æ–¥ –¥—É–ª–æ–º –∞–≤—Ç–æ–º–∞—Ç–∞ –∏–ª–∏ –ø–æ–¥ –≤–ª–∏—è–Ω–∏–µ–º –∞–Ω–∞–ª—å–Ω–æ–≥–æ –∑–æ–Ω–¥–∞.
–Ø –Ω–∞ –≥–∏—Ç—Ö–∞–±–µ, –≤ –ñ–ñ
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
DmitryR
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 14:22:49 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
>TEHb<, Цитата: Настраивайте однозначно в какой точке устанавливать высокий уровень, а в какой низкий Дело в том, что там нет таких настроек, могу только выбрать с какого уровня будет это все стартовать CH Polarity. Хотя я тогда не понимаю, почему при повторном запуске он стартует не с указанного HIGH, а с предыдущего уровня Eddy_Em, Там стоит FreeRTOS, но вроде как не планируется ее взаимодействие с этим таймером, поэтому можно и без HAL... Цитата: Ну и еще раз напомню о DMA Попробую на DMA, но мне кажется тут дело не в том, как менять ARR и CRR Цитата: А также, видимо, мимо пролетело: было же предложение SPI или I2C использовать Как-то диковато звучит реализовать функции таймера посредством SPI, но можно попробовать) Добавлено after 3 minutes 44 seconds:Eddy_Em, Цитата: P.S. А код реально жуткий. Дрыгать ногодрыгом в прерывании от таймера, когда можно напрямую в ШИМ-режиме… Если Вы про это Код: HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_4); // WorkTest То не, это не тот пин, который должен сигнал формировать, это я просто поставил, чтобы отследить на осциллографе когда срабатывает прерывание и не убрал. А так в прерывании только ARR и CRR меняется, больше там ничего не делается, ну кроме State++
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
Eddy_Em
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 14:32:03 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: -12
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: -24
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ü—Ç –∏—é–ª 12, 2019 22:52:01
–°–æ–æ–±—â–µ–Ω–∏–π: 2516
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
–ù—É –≤–æ—Ç, —á—Ç–æ–±—ã –Ω–µ –±—ã–ª–æ –ø—Ä–æ–±–ª–µ–º, –Ω—É–∂–Ω–æ –¥–µ–ª–∞—Ç—å –≤—Å–µ –±–æ–ª–µ–µ-–º–µ–Ω–µ–µ –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ. –ò, –∫—Å—Ç–∞—Ç–∏, –ø—Ä–µ–¥–ª–æ–∂–µ–Ω–∏–µ Andrey_B –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å SPI - –æ—á–µ–Ω—å –¥–∞–∂–µ –¥–µ–ª—å–Ω–∞—è –∏–¥–µ—è (–µ—Å–ª–∏ –µ—Å—Ç—å –≤ —Å–∏—Å—Ç–µ–º–µ 1 –Ω–µ–Ω—É–∂–Ω—ã–π SPI –∏ –µ–≥–æ –Ω–æ–≥–∞ MOSI —Å–≤–æ–±–æ–¥–Ω–∞—è). –ò —Ç–∞–π–º–µ—Ä –Ω–∞ —ç—Ç–æ —Ç—Ä–∞—Ç–∏—Ç—å –Ω–µ –ø—Ä–∏–¥–µ—Ç—Å—è, –∏ –∫–∞–Ω–∞–ª DMA.
–ê —Ä—Ç–æ—Å—å - —ç—Ç–æ —Ñ—É. –ï—Å–ª–∏ –ø—Ä–∏–ª–æ–∂–µ–Ω–∏–µ –¥–ª—è –ú–ö –Ω–µ–≤–æ–∑–º–æ–∂–Ω–æ –±–µ–∑ —Ä—Ç–æ—Å–∏ —Å–¥–µ–ª–∞—Ç—å, —Ç–æ –¥–µ—à–µ–≤–ª–µ –∫—É–ø–∏—Ç—å –æ–¥–Ω–æ–ø–ª–∞—Ç–Ω–∏–∫ –∑–∞ –¥–≤–µ —Ç—ã—Å—è—á–∏ —Ä—É–±–ª–µ–π –∏ —Ä–µ–∞–ª–∏–∑–æ–≤–∞—Ç—å –≤—Å—é –º–Ω–æ–≥–æ–∑–∞–¥–∞—á–Ω–æ—Å—Ç—å –Ω–∞ –Ω–æ—Ä–º–∞–ª—å–Ω–æ–º –ª–∏–Ω—É–∫—Å–µ, –∞ –¥–ª—è RT –≤—ã–¥–µ–ª–∏—Ç—å –∫–∞–∫–æ–π-–Ω–∏–±—É–¥—å –Ω–µ–¥–æ—Ä–æ–≥–æ–π –∫–∞–º—É—à–µ–∫ (–∑–∞—á–∞—Å—Ç—É—é –¥–∞–∂–µ F030 —Å–≥–æ–¥–∏—Ç—Å—è).
_________________
Linux rules! Windows must die. –ó–¥—Ä–∞–≤–æ–º—ã—Å–ª—è—â–∏–π —á–µ–ª–æ–≤–µ–∫ –¥–æ–±—Ä–æ–≤–æ–ª—å–Ω–æ –±—É–¥–µ—Ç –ø–æ–ª—å–∑–æ–≤–∞—Ç—å—Å—è –º–∞—Å—Ç–¥–∞–µ–º –ª–∏—à—å –≤ –¥–≤—É—Ö —Å–ª—É—á–∞—è—Ö: –ø–æ–¥ –¥—É–ª–æ–º –∞–≤—Ç–æ–º–∞—Ç–∞ –∏–ª–∏ –ø–æ–¥ –≤–ª–∏—è–Ω–∏–µ–º –∞–Ω–∞–ª—å–Ω–æ–≥–æ –∑–æ–Ω–¥–∞.
–Ø –Ω–∞ –≥–∏—Ç—Ö–∞–±–µ, –≤ –ñ–ñ
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
DmitryR
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 14:50:56 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
Eddy_Em, –¶–∏—Ç–∞—Ç–∞: –ê —Ä—Ç–æ—Å—å - —ç—Ç–æ —Ñ—É –Ý–¢–û–° —Ñ—É, HAL —Ñ—É, LWIP —Ñ—É, –µ—Å–ª–∏ —Ç–∞–∫ –Ω–∞ –≤—Å–µ —Ñ—É–∫–∞—Ç—å –Ω–∞ –æ–¥–Ω–∏—Ö —Ä–µ–≥–∏—Å—Ç—Ä–∞—Ö –ø—Ä–∏–¥–µ—Ç—Å—è —Å–∏–¥–µ—Ç—å –ø–∏—Å–∞—Ç—å –∫—É—á—É –≤—Ä–µ–º–µ–Ω–∏))) –î–∞ —Ç–∞–º FreeRTOS –ø–æ—Å—Ç–∞–≤–ª–µ–Ω–∞ —á–∏—Å—Ç–æ –∏–∑-–∑–∞ LWIP (—É–∂ —á—Ç–æ, –∞ ethernet —è —Ç–æ—á–Ω–æ –Ω–∞ —Ä–µ–≥–∏—Å—Ç—Ä–∞—Ö –ø–∏—Å–∞—Ç—å –Ω–µ –≥–æ—Ç–æ–≤). –ù–∞ –û–° —è —Å–∫–∏–¥—ã–≤–∞—é –≤—Å—è–∫–∏–µ –º–µ–¥–ª–µ–Ω–Ω—ã–µ –∑–∞–¥–∞—á–∏ –Ω–µ –ø–µ—Ä–≤–æ–π –Ω–µ–æ–±—Ö–æ–¥–∏–º–æ—Å—Ç–∏, –∞ –≤—Å–µ RT –¥–µ–ª–∞—é –Ω–∞ –ø—Ä–∏–æ—Ä–∏—Ç–µ—Ç–µ –≤—ã—à–µ —á–µ–º —É –û–° –∏ –Ω–µ –≤–∑–∞–∏–º–æ–¥–µ–π—Å—Ç–≤—É—é—â–∏–º–∏ —Å –û–°. –ù—É –∏ —Å—Ç–∞—Ä–∞—é—Å—å –¥–µ–ª–∞—Ç—å –∏—Ö –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ. –ö–∞–º–µ–Ω—å 746 - —Ç–∞–π–º–µ—Ä–æ–≤, SPI, DMA, –≤—Å–µ–≥–æ –ø–æ–ª–Ω–æ. –¢—É—Ç –∑–Ω–∞–µ—Ç–µ, –¥–µ–ª–æ-—Ç–æ –¥–∞–∂–µ –∏ –Ω–µ –≤ —Ä–µ–≥–∏—Å—Ç—Ä–∞—Ö, —ç—Ç–æ —É–∂–µ –¥–æ–≤–æ–ª—å–Ω–æ –∑–∞–µ–∑–∂–µ–Ω–Ω–∞—è —Ç–µ–º–∞, –æ—Ç–Ω–æ—à–µ–Ω–∏–µ –∫ HAL –¥–∞–≤–Ω–æ –ø–æ–Ω—è—Ç–Ω–æ... –¢—É—Ç —Å–∫–æ—Ä–µ–µ –≤–æ–ø—Ä–æ—Å –≤ –ø—Ä–∏–Ω—Ü–∏–ø–µ –≤ —Ñ—É–Ω–∫—Ü–∏–æ–Ω–∞–ª—å–Ω–æ–π –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç–∏ —Ä–µ–∞–ª–∏–∑–∞—Ü–∏–∏ —Ç–µ–º –∏–ª–∏ –∏–Ω—ã–º —Å–ø–æ—Å–æ–±–æ–º. –í–æ—Ç, –Ω–∞–ø—Ä–∏–º–µ—Ä, —Å–µ–π—á–∞—Å –∑–∞–¥–∞—á–∞ –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–∏ —Ä–µ—à–µ–Ω–∞, –∑–∞ –∏—Å–∫–ª—é—á–µ–Ω–∏–µ–º –ø–æ–¥–º–µ—Å–∞ ARR –∏ CRR –ø–µ—Ä–µ–∫–ª—é—á–µ–Ω–∏—è –ø–∏–Ω–∞ –ø—Ä–æ–∏—Å—Ö–æ–¥–∏—Ç –∞–ø–ø–∞—Ä–∞—Ç–Ω–æ, –Ω–æ –æ–Ω –Ω–∞—á–∏–Ω–∞–µ—Ç —Å–≤–æ–π –Ω–æ–≤—ã–π —Ü–∏–∫–ª —Å–æ –∑–Ω–∞—á–µ–Ω–∏—è –ø—Ä–µ–¥—ã–¥—É—â–µ–≥–æ. –ü—Ä–µ–¥–ø–æ–ª–∞–≥–∞—é, —á—Ç–æ —Ç–∞–∫ –ø–æ—Å—Ç—Ä–æ–µ–Ω–∞ –∞—Ä—Ö–∏—Ç–µ–∫—Ç—É—Ä–∞, —á—Ç–æ —á—Ç–æ –æ–Ω –ø—Ä–∏ –ø–µ—Ä–≤–æ–º –∑–∞–ø—É—Å–∫–µ –≤—ã—Å—Ç–∞–≤–ª—è–µ—Ç –Ω–∞—Å—Ç—Ä–æ–µ–Ω–Ω—ã–π —É—Ä–æ–≤–µ–Ω—å, –∞ –¥–∞–ª—å—à–µ –¥–µ–ª–∞–µ—Ç toggle –∏ –∫–æ–≥–¥–∞ –≤–º–µ—à–∏–≤–∞–µ—à—å—Å—è –≤ —ç—Ç–æ—Ç –ø—Ä–æ—Ü–µ—Å—Å, —Å–∏—Å—Ç–µ–º–∞ —Å–µ–±—è —Ç–∞–∫ –≤–µ–¥–µ—Ç. –ú–æ–∂–µ—Ç —Ç–æ–≥–¥–∞ –ø–æ–º–∏–º–æ —Å—Ç–∞—Ä—Ç/—Å—Ç–æ–ø –Ω–∞–¥–æ –µ—â–µ –¥–µ–ª–∞—Ç—å –∫–∞–∫—É—é-–Ω–∏–±—É–¥—å –ø–µ—Ä–µ–∏–Ω–∏—Ü–∏–∞–ª–∏–∑–∞—Ü–∏—é —Å–æ—Å—Ç–æ—è–Ω–∏—è –ø–∏–Ω–∞... –î–æ–±–∞–≤–∏—Ç—å DMA –º–æ–∂–Ω–æ, –Ω–æ –Ω–∞ –¥–∞–Ω–Ω–æ–º —ç—Ç–∞–ø–µ —ç—Ç–æ –∏–∑–º–µ–Ω–∏—Ç –ª–∏—à—å —Å–ø–æ—Å–æ–± –ø–µ—Ä–µ–∑–∞–¥–∞–Ω–∏—è ARR –∏ CRR
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
VladislavS
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 15:06:22 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
 |
–ö–∞—Ä–º–∞: 18
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 433
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞–π 01, 2018 19:44:47
–°–æ–æ–±—â–µ–Ω–∏–π: 2556
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
–Ω–æ –æ–Ω –Ω–∞—á–∏–Ω–∞–µ—Ç —Å–≤–æ–π –Ω–æ–≤—ã–π —Ü–∏–∫–ª —Å–æ –∑–Ω–∞—á–µ–Ω–∏—è –ø—Ä–µ–¥—ã–¥—É—â–µ–≥–æ. –£ —Ç–∞–π–º–µ—Ä–∞ –∂–µ –∫—É—á–∞ –≤–∞—Ä–∏–∞–Ω—Ç–æ–≤ –ø–æ–≤–µ–¥–µ–Ω–∏—è –Ω–æ–≥–∏ –ø–æ —Å–æ–±—ã—Ç–∏—é —Å—Ä–∞–≤–Ω–µ–Ω–∏—è. –°–ø–æ–π–ª–µ—Ä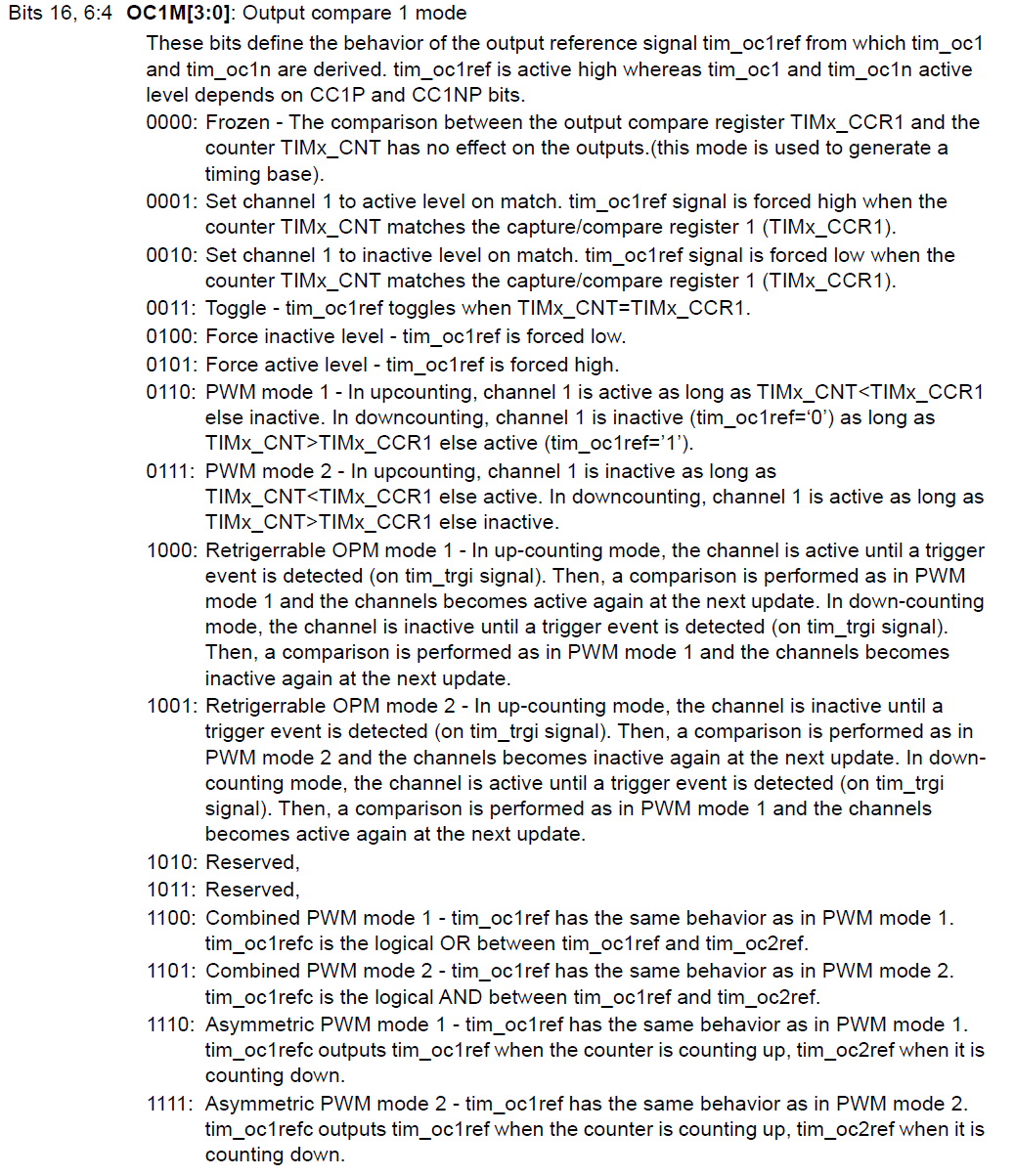 –í–ª–æ–∂–µ–Ω–∏–µ: PS:–ê —Ñ—É–∫–∞—Ç–µ–ª—è –Ω–µ —Å–ª—É—à–∞–π—Ç–µ. –û–Ω F4 —Ç–æ –µ—â—ë –Ω–µ –æ—Å–≤–æ–∏–ª, –¥–æ F7 –∫ –ø–µ–Ω—Å–∏–∏ –Ω–µ –¥–æ–±–µ—Ä—ë—Ç—Å—è —Ç–æ—á–Ω–æ —Å–æ —Å–≤–æ–∏–º–∏ —Ñ—É.
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
DmitryR
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 15:22:24 |
|
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä –∞–≤–≥ 31, 2022 12:10:34
–°–æ–æ–±—â–µ–Ω–∏–π: 100
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
|
VladislavS, –í–∏–¥–∏–º–æ –º–Ω–µ –Ω–∞–¥–æ –ø–æ–≥–ª—É–±–∂–µ –ø–æ–∫–∞–ø–∞—Ç—åc—è –≤ Reference manual.
–û–ø—è—Ç—å –∂–µ, –∫–∞–∫ –í—ã –∏ –Ω–∞–ø–∏—Å–∞–ª–∏, —ç—Ç–æ –Ω–∞—Å—Ç—Ä–æ–π–∫–∏ –Ω–∞ —Å–æ–±—ã—Ç–∏–µ —Å—Ä–∞–≤–Ω–µ–Ω–∏—è, –∞ –ø–æ —Å–æ–±—ã—Ç–∏—é —Å—Ä–∞–≤–Ω–µ–Ω–∏—è –Ω–∞–¥–æ –º–µ–Ω—è—Ç—å ARR –∏ –°–°R. –ù–µ –∑–Ω–∞—é –¥–∞–∂–µ... –ù–∞–¥–æ –º–Ω–µ –ø–æ—á–∏—Ç–∞—Ç—å —Å–Ω–∞—á–∞–ª–∞
PS: –î–ª—è —Å–µ–±—è —è —Å–¥–µ–ª–∞–ª –≤—ã–≤–æ–¥, —á—Ç–æ –≤—Å–µ, —á—Ç–æ –Ω–µ –∫—Ä–∏—Ç–∏—á–Ω–æ –Ω–∞ HAL –∏–ª–∏ LL, –∫—Ä–∏—Ç–∏—á–Ω—ã–µ —Ñ—É–Ω–∫—Ü–∏–∏ –Ω–∞ CMSIS –∏–ª–∏, –≤ –Ω–µ–∫–æ—Ç–æ—Ä—ã—Ö —Å–ª—É—á–∞—è—Ö, LL. –¢–∏–ø–∞ –∑–æ–ª–æ—Ç–∞—è —Å–µ—Ä–µ–¥–∏–Ω–∞ –ø–æ-–º–æ–µ–º—É –º–Ω–µ–Ω–∏—é
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
VladislavS
|
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Ç–∞–π–º–µ—Ä–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–µ–º –≤—ã–≤–æ–¥–∞ –î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä –æ–∫—Ç 12, 2022 15:55:09 |
|
| –°–æ–±—É—Ç—ã–ª—å–Ω–∏–∫ –ö–æ—Ç–∞ |
|
–ö–∞—Ä–º–∞: 18
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 433
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞–π 01, 2018 19:44:47
–°–æ–æ–±—â–µ–Ω–∏–π: 2556
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
|
ARR –º–æ–∂–µ—Ç –±—ã—Ç—å –±—É—Ñ–µ—Ä–∏–∑–∏—Ä–æ–≤–∞–Ω –∏ –Ω–æ–≤–æ–µ –∑–Ω–∞—á–µ–Ω–∏–µ –±—É–¥–µ—Ç –∞–∫—Ç–∏–≤–∏—Ä–æ–≤–∞—Ç—å—Å—è –ø—Ä–∏ –¥–æ—Å—Ç–∏–∂–µ–Ω–∏–∏ —Ç–µ–∫—É—â–µ–≥–æ.  –í–ª–æ–∂–µ–Ω–∏–µ:
|
|
| –í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö |
|
|
|
|
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 1 –∏–∑ 2
|
[ –°–æ–æ–±—â–µ–Ω–∏–π: 37 ] |
, |
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ |
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 15 |
|
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è
|
|
|







