–§–æ—Ä—É–º –Ý–∞–¥–∏–æ–ö–æ—Ç • –ü—Ä–æ—Å–º–æ—Ç—Ä —Ç–µ–º—ã - –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–°–æ–æ–±—â–µ–Ω–∏—è –±–µ–∑ –æ—Ç–≤–µ—Ç–æ–≤ | –ê–∫—Ç–∏–≤–Ω—ã–µ —Ç–µ–º—ã
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 2 –∏–∑ 5
[ –°–æ–æ–±—â–µ–Ω–∏–π: 97 ]
, , , ,
–ê–≤—Ç–æ—Ä
–°–æ–æ–±—â–µ–Ω–∏–µ
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Ñ–µ–≤ 07, 2022 14:22:06
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ü—Ä–∏–≤–µ—Ç!
–Ý–æ–º–∞–Ω, —Å–ø–∞—Å–∏–±–æ –∑–∞ –Ω–∞–≤–æ–¥–∫—É –Ω–∞ —Ö–∞–±—Ä–µ. –ë—É–¥—É —Å–ª–µ–¥–∏—Ç—å –∑–∞ —Ç–≤–æ—Ä—á–µ—Å—Ç–≤–æ–º —ç—Ç–æ–≥–æ —á–µ–ª–∞
–î–æ–±–∞–≤–ª–µ–Ω–æ after 3 hours 25 minutes 52 seconds: –ó–∞–ø–∏–ª–∏–ª —Ç–µ—Å—Ç–æ–≤—ã–π –º–∞–∫–µ—Ç —Å –≤–æ–∑–º–æ–∂–Ω–æ—Å—Ç—å—é –ø–µ—Ä–µ–∫–ª—é—á–∏—Ç—å —à–∏–Ω—É i2c –º–∞–≥–Ω–∏—Ç–æ–º–µ—Ç—Ä–∞ —á–µ—Ä–µ–∑ MPU-6500
–ï—Å—Ç—å –∂–µ–ª–∞–Ω–∏–µ –ø–æ—â—É–ø–∞—Ç—å DMP. –ü–µ—Ä–≤—ã–π —Ä–∞–∑ –æ–± —ç—Ç–æ–º —Å–ª—ã—à—É
–ü—Ä–∏–º–µ—Ä–Ω–∞—è –∫–æ–º–ø–æ–Ω–æ–≤–∫–∞ –≤ –∫–æ—Ä–æ–±–æ—á–∫–µ –ö–ú41212-01 (–≤ –ë–∞—É—Ü–µ–Ω—Ç—Ä–µ –ø–æ–∫—É–ø–∞–ª) –ø—Ä–∏–º–µ—Ä–Ω–æ —Ç–∞–∫–∞—è
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Ñ–µ–≤ 07, 2022 19:56:37
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∑–∞—á–µ–º i2c... –µ—Å—Ç—å –∂–µ –Ω–æ—Ä–º–∞–ª—å–Ω—ã–π –±—ã—Å—Ç—Ä—ã–π SPI...
https://aliexpress.ru/item/100500309378 ... 76b52Yrnaz –í–ª–æ–∂–µ–Ω–∏–µ:
spi.jpg [7.67 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 149
–í–ª–æ–∂–µ–Ω–∏–µ:
2.jpg [47.92 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 134
–í–ª–æ–∂–µ–Ω–∏–µ:
3.jpg [45.64 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 140
–í–ª–æ–∂–µ–Ω–∏–µ:
4.jpg [33.51 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 129
...
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ü–Ω —Ñ–µ–≤ 07, 2022 20:19:46
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–î–æ–ª–≥–æ –∂–¥–∞—Ç—å –ø–æ—Å—ã–ª–∫–∏... –ê —Ç–∞–∫, —á—Ç–æ –≤ –∑–∞–∫—Ä–æ–º–∞—Ö –Ω–∞—à–µ–ª —Ç–µ–º –∏ –ø–æ–ª—å–∑—É—é—Å—å
–ò—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –ø–ª–∞—Ç—ã —Å SPI —Å–º—ã—Å–ª–∞ –Ω–µ –≤–∏–∂—É. –í—Ä–µ–º—è –¥–ª—è –æ—Ü–∏—Ñ—Ä–æ–≤–∫–∏ –¥–∞–Ω–Ω—ã—Ö –∞–∫—Å–µ–ª–µ—Ä–æ–º–µ—Ç—Ä–∞ –∏ –≥–∏—Ä–æ—Å–∫–æ–ø–∞ –¥–æ 10ms,
–∞ –µ—Å–ª–∏ –∑–∞–¥–µ–π—Å—Ç–≤–æ–≤–∞—Ç—å DMP –±—É–¥–µ—Ç –µ—â–µ –±–æ–ª—å—à–µ. –ê–ø–ø–∞—Ä–∞—Ç–Ω–æ–µ –ø—Ä–µ—Ä—ã–≤–∞–Ω–∏–µ –Ω–µ –∏—Å–ø–æ–ª—å–∑—É–µ—Ç—Å—è. –ó–∞–±–æ—Ä –¥–∞–Ω–Ω—ã—Ö –ø–æ —Ç–∞–π–º–µ—Ä—É —Å–¥–µ–ª–∞—é.
–ò –¥–ª—è –∞–≤—Ç–æ–ø–∏–ª–æ—Ç–∞ –¥–∏—Å–∫—Ä–µ—Ç–Ω–æ—Å—Ç—å –ø–æ–ª—É—á–µ–Ω–∏—è —ç—Ç–∏—Ö –¥–∞–Ω–Ω—ã—Ö –≤ 0.5-1 —Å–µ–∫ –±—É–¥–µ—Ç –≤—ã—à–µ –∫—Ä—ã—à–∏. –õ–æ–¥–∫–∏ –ø–æ–¥ –ø–∞—Ä—É—Å–∞–º–∏ –±—ã—Å—Ç—Ä–æ –Ω–µ —Ö–æ–¥—è—Ç.
7-10 —É–∑–ª–æ–≤ —ç—Ç–æ —É–∂–µ —Ö–æ—Ä–æ—à–æ. –¢–∞–∫ —á—Ç–æ –±—ã—Å—Ç—Ä—ã–µ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å—ã –Ω–∏ –∫ —á–µ–º—É
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Ñ–µ–≤ 08, 2022 16:05:50
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
maxlab –ø–∏—Å–∞–ª(–∞):
–ò—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –ø–ª–∞—Ç—ã —Å SPI —Å–º—ã—Å–ª–∞ –Ω–µ –≤–∏–∂—É.
–≤–æ–ø—Ä–æ—Å –Ω–µ –≤ —Å–∫–æ—Ä–æ—Å—Ç–∏... –≤–æ–ø—Ä–æ—Å –≤ —É–Ω–∏—Ñ–∏–∫–∞—Ü–∏–∏ –∏ —Å—Ç–∞–Ω–¥–∞—Ä—Ç–∏–∑–∞—Ü–∏–∏...
–∫ –ø—Ä–∏–º–µ—Ä—É –≤ –Ω–∞—à–µ–º –∫–æ—Ä–∞–±–ª–∏–∫–µ –≤—Å–µ –º–æ–¥—É–ª–∏ –ø–æ–¥–∫–ª—é—á–µ–Ω—ã –∫ —Ü–µ–Ω—Ç—Ä–∞–ª—å–Ω–æ–º—É –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä—É –ø–æ –æ–±—â–µ–π —à–∏–Ω–µ SPI
–í–ª–æ–∂–µ–Ω–∏–µ:
1.jpg [83.8 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 141
–∞–Ω–∞–ª–æ–≥–∏—á–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –∏ –ü–ö
–í–ª–æ–∂–µ–Ω–∏–µ:
2.jpg [55.02 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 148
—É –Ω–∞—Å –Ω–µ –ø—Ä–æ—Å—Ç–æ –∏–≥—Ä—É—à–µ—á–Ω—ã–π –∫–æ—Ä–∞–±–ª–∏–∫)) —É –Ω–∞—Å –ø–ª–∞—Ç—Ñ–æ—Ä–º–∞ –¥–ª—è –æ—Ç—Ä–∞–±–æ—Ç–∫–∏ –Ω–æ–≤—ã—Ö —Ç–µ—Ö–Ω–æ–ª–æ–≥–∏–π...
–ü—Ä–∞–≤–¥–∞ –Ω–µ –≤—Å–µ —ç—Ç–æ –ø–æ–Ω—è–ª–∏... –Ω—É –∏ –ª–∞–¥–Ω–æ))
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Ç —Ñ–µ–≤ 08, 2022 16:21:09
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–Ø –Ω–µ –≤–æ–∑—Ä–∞–∂–∞—é
–ó–¥–µ—Å—å –Ω–µ –º–Ω–æ–≥–æ –¥—Ä—É–≥–∞—è –∫–æ–Ω—Ü–µ–ø—Ü–∏—è...
–¶–µ–Ω—Ç—Ä–∞–ª—å–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä, –æ–Ω –∂–µ –º–∞—Å—Ç–µ—Ä —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ, –æ–±—â–∞–µ—Ç—Å—è —Å —Ä–∞–∑–ª–∏—á–Ω—ã–º–∏ –º–æ–¥—É–ª—è–º–∏, –¥–∞—Ç—á–∏–∫–∞–º–∏ –∏ –∏—Å–ø–æ–ª–Ω–∏—Ç–µ–ª—å–Ω—ã–º–∏
—É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞–º–∏ –ø–æ—Å—Ä–µ–¥—Å—Ç–≤–æ–º ModBus. –í—Å–µ —ç—Ç–∏ –¥–µ–≤–∞–π—Å—ã —É—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞—é—Ç—Å—è –≤ —Ä–∞–∑–Ω—ã—Ö –º–µ—Å—Ç–∞—Ö, –≤–ø–ª–æ—Ç—å –¥–æ —Ç–æ–ø–∞ –º–∞—á—Ç—ã. –≠—Ç–æ –Ω–µ –≤ –æ–¥–Ω–æ–π –∫–æ—Ä–æ–±–∫–µ. –ê –∫–æ–Ω–∫—Ä–µ—Ç–Ω–∞—è —Ä–µ–∞–ª–∏–∑–∞—Ü–∏—è –∫–æ–Ω–µ—á–Ω—ã—Ö —É—Å—Ç—Ä–æ–π—Å—Ç–≤ –∏—Å—Ç–µ–∫–∞–µ—Ç –∏–∑ —ç–ª–µ–º–µ–Ω—Ç–Ω–æ–π –±–∞–∑—ã —á—Ç–æ –ø–æ–¥ —Ä—É–∫–æ–π. –ö–∞–∫ —Ç–æ —Ç–∞–∫
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 09, 2022 15:36:38
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–û—Å—Ç–∞–ª—Å—è –ø–æ—Å–ª–µ–¥–Ω–∏–π –≤–æ–ø—Ä–æ—Å - –∑–∞ —á—Ç–æ –æ—Ç–≤–µ—á–∞–µ—Ç –¶–µ–Ω—Ç—Ä–∞–ª—å–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä, –æ–Ω –∂–µ –º–∞—Å—Ç–µ—Ä —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ ?
–≥–ª–∞–≤–Ω—ã–π –≤–æ–ø—Ä–æ—Å - —Ä–∞—Å–ø—Ä–µ–¥–µ–ª–µ–Ω–∏–µ –∑–∞–¥–∞—á (—Ç–æ—á–Ω–µ–µ —Ä–∞—Å–ø—Ä–µ–¥–µ–ª–µ–Ω–∏–µ –≤—ã—á–∏—Å–ª–∏—Ç–µ–ª—å–Ω—ã—Ö —Ä–µ—Å—É—Ä—Å–æ–≤).
–≤–æ–ø—Ä–æ—Å - –∞ –ø–æ—Ç—è–Ω–µ—Ç –ª–∏ –æ–¥–∏–Ω –¶–µ–Ω—Ç—Ä–∞–ª—å–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä, –æ–Ω –∂–µ –º–∞—Å—Ç–µ—Ä —É—Å—Ç—Ä–æ–π—Å—Ç–≤–æ ?
–∫ –ø—Ä–∏–º–µ—Ä—É –º—ã –ø–æ–¥–∫–ª—é—á–∞–ª–∏ –∫ –æ–¥–Ω–æ–º—É —Ü–µ–Ω—Ç—Ä–∞–ª—å–Ω–æ–º—É –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä—É —ç–∫—Ä–∞–Ω—á–∏–∫–∏ –≤—Å—è–∫–∏–µ...
4 —ç–∫—Ä–∞–Ω—á–∏–∫–∞ OLED –∏/–∏–ª–∏ LCD –æ–¥–∏–Ω –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä —Ç—è–Ω–µ—Ç —Å–ø–æ–∫–æ–π–Ω–æ...
–í–ª–æ–∂–µ–Ω–∏–µ:
4_—ç–∫—Ä–∞–Ω—á–∏–∫–∞.jpg [122.24 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 141
–∞ –≤–æ—Ç —ç–∫—Ä–∞–Ω—á–∏–∫ TFT –æ–¥–∏–Ω –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä —É–∂–µ –Ω–µ —Ç—è–Ω–µ—Ç... —Ç–æ—á–Ω–µ–µ —Ç—è–Ω–µ—Ç –Ω–æ —Å –Ω–∏–∑–∫–∏–º fps...
–ü—Ä–∏—à–ª–æ—Å—å —Å—Ç–∞–≤–∏—Ç—å –æ—Ç–¥–µ–ª—å–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä - –≤–∏–¥–µ–æ–∫–∞—Ä—Ç—É ))
–í–ª–æ–∂–µ–Ω–∏–µ:
–≤–∏–¥–µ–æ–∫–∞—Ä—Ç–∞.jpg [106.2 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 134
–ø–æ—Ç–æ–º —Ä–µ—à–∏–ª–∏ —Å–¥–µ–ª–∞—Ç—å –∞–≤—Ç–æ–ø–∏–ª–æ—Ç... –Ω–æ –æ–∫–∞–∑–∞–ª–æ—Å—å —á—Ç–æ –æ–¥–∏–Ω –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä –Ω–µ —Ç—è–Ω–µ—Ç –∏ —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –≤—Å–µ–º–∏ —É—Å—Ç—Ä–æ–π—Å—Ç–≤–∞–º–∏ –∏ –∞–≤—Ç–æ–ø–∏–ª–æ—Ç... –ø—Ä–∏—à–ª–æ—Å—å —Å—Ç–∞–≤–∏—Ç—å –æ—Ç–¥–µ–ª—å–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä –Ω–∞ –∞–≤—Ç–æ–ø–∏–ª–æ—Ç... ESP32
–í–ª–æ–∂–µ–Ω–∏–µ:
–∞–≤—Ç–æ–ø–∏–ª–æ—Ç.jpg [93.97 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 148
–ø–æ—ç—Ç–æ–º—É –Ω–∞–¥–æ –≤—Å—ë —Ö–æ—Ä–æ—à–æ –ø—Ä–æ–¥—É–º–∞—Ç—å —á—Ç–æ–± –±–æ–ª—å—à–µ –Ω–µ –ø–æ–≤—Ç–æ—Ä—è—Ç—å –æ—à–∏–±–æ–∫.
–∞ –ø–æ—Ç–æ–º –∫–æ–Ω—Ü–µ–ø—Ü–∏—è –∏–∑–º–µ–Ω–∏–ª–∞—Å—å))
–∏ –≤–º–µ—Å—Ç–æ –æ—Ç–¥–µ–ª—å–Ω–æ–≥–æ –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä–∞ —Ä–µ—à–∏–ª–∏ —Å–¥–µ–ª–∞—Ç—å –≤—Å—ë —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –Ω–∞ –≥–∞–¥–∂–µ—Ç–µ...
–í–ª–æ–∂–µ–Ω–∏–µ:
–≥–∞–¥–∂–µ—Ç.jpg [104.01 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 151
–≤ –ª—é–±–æ–º —Å–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–º –≥–∞–¥–∂–µ—Ç–µ —Å—Ç–æ–∏—Ç –º–æ—â–Ω—ã–π –ø—Ä–æ—Ü–µ—Å—Å–æ—Ä —Å –æ–≥—Ä–æ–º–Ω—ã–º –∑–∞–ø–∞—Å–æ–º –≤—ã—á–∏—Å–ª–∏—Ç–µ–ª—å–Ω—ã—Ö —Ä–µ—Å—É—Ä—Å–æ–≤))
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 09, 2022 16:54:04
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù—É —Ç–∞–∫... —è –∂–µ –≤—ã—à–µ –ø–∏—Å–∞–ª —á—Ç–æ –≤ –∫–∞—á–µ—Å—Ç–≤–µ –º–∞—Å—Ç–µ—Ä–∞ –Ω–µ—Ç–±—É–∫ (–∏–ª–∏ –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—ã–π/–º–∏–ª–∏—Ç–∞—Ä–∏ –Ω–æ—É—Ç) –±—É–¥—É –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å
–ó–∞—á–µ–º –≤–µ–ª–æ—Å–∏–ø–µ–¥ –∏–∑–æ–±—Ä–µ—Ç–∞—Ç—å.
–ê –æ—Ç–≤–µ—á–∞–µ—Ç –æ–Ω –∑–∞ –≤—Å–µ...
–¶–µ–Ω—Ç—Ä–∞–ª—å–Ω–æ–µ –ü–û - OpenCPN
–í—Å–ø–æ–º–æ–≥–∞—Ç–µ–ª—å–Ω–æ–µ –ü–û - Processing (–æ–Ω –∂–µ Java)
–ù—É –∏ —Å–∞–º–æ–ø–∏—Å–Ω—ã–µ –ø–ª–∞–≥–∏–Ω—ã... –ê–≤—Ç–æ–ø–∏–ª–æ—Ç –∑–∞—é–∑–∞—é pyPilot. –¢–∞–º —Ç–æ–ª—å–∫–æ —Å —Å–æ–ø—Ä—è–∂–µ–Ω–∏–µ–º –ø–æ–≤–æ–∑–∏—Ç—å—Å—è –Ω–∞–¥–æ
–°–º–∞—Ä—Ç—Ñ–æ–Ω—ã —Å–µ–π—á–∞—Å –∫–æ–Ω–µ—á–Ω–æ –ø—Ä–æ–¥–≤–∏–Ω—É—Ç—ã–µ, –Ω–æ —è –∏–º –Ω–µ –¥–æ–≤–µ—Ä—è—é
–ò –µ—â–µ, –∫–∞–∫ –≤–∞—Ä–∏–∞–Ω—Ç, –º–∞–ª–∏–Ω–∫–∞ 4 —Å 8–ì–± –Ω–∞ –±–æ—Ä—Ç—É –∏–ª–∏ Rock PI
–ü–æ—Å–ª–µ–¥–Ω–∏–π —Ä–∞–∑ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å maxlab –°—Ä —Ñ–µ–≤ 09, 2022 17:08:49, –≤—Å–µ–≥–æ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞–ª–æ—Å—å 1 —Ä–∞–∑.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
electroget
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 09, 2022 17:07:39
–î—Ä—É–≥ –ö–æ—Ç–∞
–ö–∞—Ä–º–∞: 5
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 61
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°—Ä —Å–µ–Ω 30, 2020 16:51:47–°–æ–æ–±—â–µ–Ω–∏–π: 4625–û—Ç–∫—É–¥–∞: –Ý–§
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
Virtuino
–ê Virtuino —ç—Ç–æ –¥–ª—è —á–µ–≥–æ? –î–ª—è —Ä–∞–∑—Ä–∞–±–æ—Ç–∫–∏ –∏–Ω—Ç–µ—Ä—Ñ–µ–π—Å–∞?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 09, 2022 17:53:36
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–Ω—É –∑–∞–º–µ—á–∞—Ç–µ–ª—å–Ω–æ)) –æ—Å—Ç–∞–ª–æ—Å—å –Ω–∞—Ä–∏—Å–æ–≤–∞—Ç—å —Å—Ö–µ–º—É))
–í–ª–æ–∂–µ–Ω–∏–µ:
—Å—Ö–µ–º–∞.jpg [104.76 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 164
–Ω—É –º–æ–∂–Ω–æ –∏ —Ç–∞–∫.
—É –Ω–∞—Å —Ç–æ–∂–µ –±—ã–ª–∞ —Ç–∞–∫–∞—è –º—ã—Å–ª—å))
—Ç–æ–ª—å–∫–æ –Ω–æ—É—Ç –∏–º–µ–µ—Ç —Å–≤–æ–π—Å—Ç–≤–æ –∏–Ω–æ–≥–¥–∞ –∑–∞–≤–∏—Å–∞—Ç—å)) —ç—Ç–æ –Ω–∞–¥–æ —É—á–∏—Ç—ã–≤–∞—Ç—å...
–º—ã —ç—Ç–æ —Ä–µ—à–∏–ª–∏ –æ—á–µ–Ω—å –ø—Ä–æ—Å—Ç–æ - –≤ —Å–ª—É—á–∞–µ –µ—Å–ª–∏ –ø—É–ª—å—Ç (–∏–ª–∏ –ü–ö) –Ω–µ –æ—Ç–≤–µ—á–∞–µ—Ç —Ç–æ –≤ –∫–æ—Ä–∞–±–ª–∏–∫–µ —á–µ—Ä–µ–∑ —Å–µ–∫—É–Ω–¥—É —Å—Ä–∞–±–∞—Ç—ã–≤–∞–µ—Ç —Ç–∞–π–º–µ—Ä –∏ –∫–æ—Ä–∞–±–ª–∏–∫ –æ—Å—Ç–∞–Ω–∞–≤–ª–∏–≤–∞–µ—Ç - –≤—ã–∫–ª—é—á–∞–µ—Ç—Å—è –¥–≤–∏–≥–∞—Ç–µ–ª—å, —Ä—É–ª—å –≤ –ø–µ—Ä–µ–≤–æ–¥–∏—Ç—Å—è –≤ —Å—Ä–µ–¥–Ω–µ–µ –ø–æ–ª–æ–∂–µ–Ω–∏–µ –∏ –∫–æ—Ä–∞–±–ª–∏–∫ —Å–æ–æ–±—â–∞–µ—Ç –Ω–∞–º –æ –ø–æ—Ç–µ—Ä–∏ —Å–≤—è–∑–∏ —Å –ø—É–ª—å—Ç–æ–º (–∏–ª–∏ –ü–ö) —è—Ä–∫–∏–º –º–∏–≥–∞–Ω–∏–µ–º —Ñ–æ–Ω–∞—Ä–µ–π —Å–æ –∑–≤—É–∫–æ–≤–æ–π —Å–∏–≥–Ω–∞–ª–∏–∑–∞—Ü–∏–µ–π))
–Ω–∞–¥–æ –µ—â—ë —Å–¥–µ–ª–∞—Ç—å —É–¥–∞–ª—ë–Ω–Ω—É—é –ø–µ—Ä–µ–∑–∞–≥—Ä—É–∑–∫—É –ü–ö...
–∞ –≤ –∏–¥–µ–∞–ª–µ –Ω–∞–¥–æ —Å–¥–µ–ª–∞—Ç—å –≥–æ—Ä—è—á–µ–µ —Ä–µ–∑–µ—Ä–≤–∏—Ä–æ–≤–∞–Ω–∏–µ - –≤ —Å–ª—É—á–∞–µ –æ—Ç–∫–∞–∑–∞ –æ–¥–Ω–æ–≥–æ –ü–ö –≤—Å—ë —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç –∫ —Ä–µ–∑–µ—Ä–≤–Ω–æ–º—É –ü–ö...
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–Ý–µ–∫–ª–∞–º–∞
Martian
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 09, 2022 18:19:41
–ö–∞—Ä–º–∞: 67
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 1964
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –°–± –¥–µ–∫ 18, 2021 19:25:32–°–æ–æ–±—â–µ–Ω–∏–π: 12867
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–ù–µ—Ç –Ω–∞ —è—Ö—Ç–µ –∞–≤—Ç–æ–ø–∏–ª–æ—Ç–æ–≤, —á—Ç–æ –≤—ã –∫–∞–∫ —Å—É—Ö–æ–ø—É—Ç–Ω—ã–µ –∫—Ä—ã—Å—ã - –∞–≤—Ç–æ—Ä—É–ª–µ–≤–æ–π!
—Å—Ö–µ–º–∞ - –æ—Ñ–∏–≥–µ–Ω–Ω–∞—è. –∞–∂ –∂—É—Ç—å.
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°—Ä —Ñ–µ–≤ 09, 2022 22:45:22
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–Ý–µ–∑–µ—Ä–≤–∏—Ä–æ–≤–∞–Ω–∏–µ –±—É–¥–µ—Ç. –ì–ª–∞–≤–Ω—ã–π —Ä–µ–∑–µ—Ä–≤ —ç—Ç–æ –∫–æ–º–∞–Ω–¥–∞
–∏ —Ç—Ä–∞–¥–∏—Ü–∏–æ–Ω–Ω—ã–µ —Å–ø–æ—Å–æ–±—ã –Ω–∞–≤–∏–≥–∞—Ü–∏–∏. –ù—É, –∏–ª–∏ —è... –µ—Å–ª–∏ –≤ –æ–¥–Ω–æ —Ä—ã–ª–æ —Ö–æ–¥–∏—Ç—å
–Ý–æ–º–∞–Ω, –∞ —á—Ç–æ –∑–∞ –ø–ª–∞—Ç–∞ —ç—Ö–æ–ª–æ—Ç–∞ –≤ –í–∞—à–µ–º –ø—Ä–æ–µ–∫—Ç–µ?
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 10, 2022 12:03:42
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
Morroc
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 10, 2022 12:45:54
–ö–∞—Ä–º–∞: 49
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 547
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –ß—Ç —Ñ–µ–≤ 20, 2014 18:57:55–°–æ–æ–±—â–µ–Ω–∏–π: 19492
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–≤ —Å–ª—É—á–∞–µ –æ—Ç–∫–∞–∑–∞ –æ–¥–Ω–æ–≥–æ –ü–ö –≤—Å—ë —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç –∫ —Ä–µ–∑–µ—Ä–≤–Ω–æ–º—É –ü–ö...
—á—Ç–æ —Ç–æ —Å—Ä–∞–∑—É –≤—Å–ø–æ–º–Ω–∏–ª–æ—Å—å "–∞ –Ω–∞ —ç—Ç–æ—Ç —Å–ª—É—á–∞–π —É –º–µ–Ω—è –ø—Ä–æ–µ–∑–¥–Ω–æ–π"
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –ß—Ç —Ñ–µ–≤ 10, 2022 15:28:21
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
roman.com –ø–∏—Å–∞–ª(–∞):
–≥–æ—Ä—è—á–µ–µ —Ä–µ–∑–µ—Ä–≤–∏—Ä–æ–≤–∞–Ω–∏–µ - –≤ —Å–ª—É—á–∞–µ –æ—Ç–∫–∞–∑–∞ –æ–¥–Ω–æ–≥–æ –ü–ö –≤—Å—ë —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ –ø–µ—Ä–µ—Ö–æ–¥–∏—Ç –∫ —Ä–µ–∑–µ—Ä–≤–Ω–æ–º—É –ü–ö...
—ç—Ç–æ —Å—Ç–∞–Ω–¥–∞—Ä—Ç–Ω–∞—è —Å–∏—Å—Ç–µ–º–∞ –ª—é–±–æ–≥–æ —Å–æ–≤—Ä–µ–º–µ–Ω–Ω–æ–≥–æ –∞–≤—Ç–æ–ø–∏–ª–æ—Ç–∞...
–≤ —Å–∞–º–æ–ª—ë—Ç–µ 5 —à—Ç—É–∫ –∫–æ–º–ø—å—é—Ç–µ—Ä–æ–≤ –¥—É–±–ª–∏—Ä—É—é—â–∏—Ö –¥—Ä—É–≥ –¥—Ä—É–≥–∞...
–í–ª–æ–∂–µ–Ω–∏–µ:
–∞–≤—Ç–æ–ø–∏–ª–æ—Ç.jpg [55.34 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 144
–î–æ–±–∞–≤–ª–µ–Ω–æ after 2 minutes 18 seconds: –∞ –≤–º–µ—Å—Ç–æ ModBus –º—ã —Ä–∞–∑—Ä–∞–±–æ—Ç–∞–ª–∏ —Å–≤–æ–π —Å–æ–±—Å—Ç–≤–µ–Ω–Ω—ã–π –ø—Ä–æ—Ç–æ–∫–æ–ª –Ω–∞ AVR ))
–í–ª–æ–∂–µ–Ω–∏–µ:
PING_100–∫–±–∏—Ç.jpg [125.68 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 144
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –°–± —Ñ–µ–≤ 12, 2022 23:11:22
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
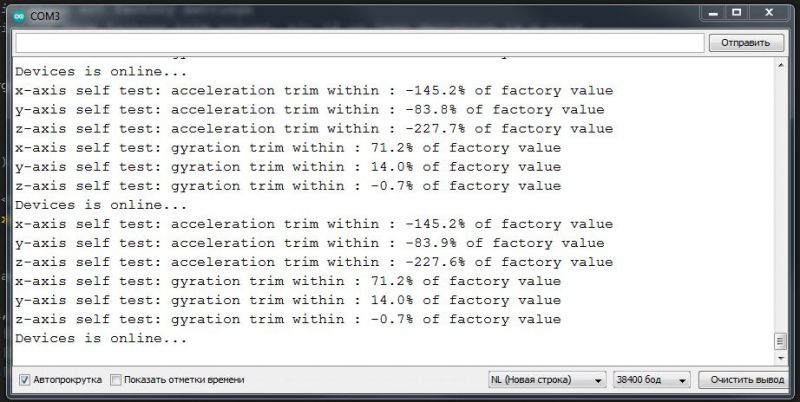
–ü—Ä–∏–≤–µ—Ç –≤—Å–µ–º! –í –æ–±—â–µ–º —Å IMU-6500 (–∞–∫—Å–µ–ª—å-–≥–∏—Ä–æ—Å–∫–æ–ø) –∫–∞–∫–∏–µ —Ç–æ –Ω–µ–ø–æ–Ω—è—Ç–∫–∏.
–í—Ä–æ–¥–µ –ø–∏—à—É—Ç —á—Ç–æ –æ—Ç–∫–ª–æ–Ω–µ–Ω–∏–µ –º–µ–∂–¥—É —Ç–µ–∫—É—â–∏–º –∑–∞–º–µ—Ä–æ–º –≤ –Ω–µ–ø–æ–¥–≤–∏–∂–Ω–æ–º —Å–æ—Å—Ç–æ—è–Ω–∏–∏ –∏ —Ñ–∞–±—Ä–∏—á–Ω—ã–º –Ω–µ –¥–æ–ª–∂–Ω–æ –ø—Ä–µ–≤—ã—à–∞—Ç—å 14% –ø–æ –≤—Å–µ–º –∏–∑–º–µ—Ä–µ–Ω–∏—è–º.
–ê —É –º–µ–Ω—è –∫–∞–∫–∞—è —Ç–æ —Ñ–∏–≥–Ω—è. –•–æ—Ç—è, —É–∂–µ 3 —á–∞—Å–∞ –Ω–∞–±–ª—é–¥–∞—é –∑–∞ –ø—Ä–æ—Ü–µ–¥—É—Ä–æ–π —Å–∞–º–æ—Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏—è, –¥–∞–µ—Ç –æ–¥–Ω–∏ –∏ —Ç–µ –∂–µ —Ä–µ–∑—É–ª—å—Ç–∞—Ç—ã.
–ê–ø–Ω–æ—Ç–∞ –ø–æ selftest –≤ —Å–µ—Ç–∏ –Ω–µ –Ω–∞—à–µ–ª. –ú–æ–∂–µ—Ç —è —á—Ç–æ —Ç–æ –¥–µ–ª–∞—é –Ω–µ —Ç–∞–∫? –ò–ª–∏ –∑–∞–±–∏—Ç—å –Ω–∞ —ç—Ç–æ??? –í—Å–µ —Ä–∞–≤–Ω–æ –≤ —Ä—É—á–Ω—É—é –∫–∞–ª–∏–±—Ä–æ–≤–∞—Ç—å –±—É–¥—É
–î–æ–±–∞–≤–ª–µ–Ω–æ after 5 minutes 8 seconds: –ü—Ä–æ—Ü–µ–¥—É—Ä–∞ —Å–∞–º–æ-—Ç–µ—Å—Ç–∏—Ä–æ–≤–∞–Ω–∏—è —É –ø—Ä–∞–∫—Ç–∏—á–µ—Å–∫–∏ –≤—Å–µ—Ö –ø–æ—Å—Ç–∞–≤—â–∏–∫–æ–≤ –±–∏–±–ª–∏–æ—Ç–µ–∫ –Ω–∞ –ì–∏—Ç–•–∞–±–µ –ø—Ä–∏–º–µ—Ä–Ω–æ –æ–¥–∏–Ω–∞–∫–æ–≤–∞—è
–∏ –≤—ã–≥–ª—è–¥–∏—Ç —Ç–∞–∫
–°–ø–æ–π–ª–µ—Ä –ö–æ–¥:
// Accelerometer and gyroscope self test; check calibration wrt factory settings
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Ñ–µ–≤ 13, 2022 14:26:51
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∞ –∫–∞–∫ –º—ã –∫–æ–º–ø –ø–æ–¥–∫–ª—é—á–∞—Ç—å –±—É–¥–µ–º ?
–í–ª–æ–∂–µ–Ω–∏–µ:
—Å—Ö–µ–º–∞.jpg [104.76 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 133
—á–µ—Ä–µ–∑ COM —á—Ç–æ –ª–∏ ? ))
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Ñ–µ–≤ 13, 2022 15:45:55
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–í–∞—Ä–∏–∞–Ω—Ç–æ–≤ –º–∞—Å—Å–∞. –Ø –∏—Å–ø–æ–ª—å–∑—É—é —Ç–∞–∫–æ–π –∫–æ–Ω–≤–µ—Ä—Ç–µ—Ä
https://aliexpress.ru/item/400129246584 ... 5642843938 –ù–æ—Ä–º–∞–ª—å–Ω–æ —Ä–∞–±–æ—Ç–∞–µ—Ç –¥–∞–∂–µ –≤ —Ü–µ—Ö–æ–≤—ã—Ö —É—Å–ª–æ–≤–∏—è—Ö –≤–±–ª–∏–∑–∏ –æ–±–æ—Ä—É–¥–æ–≤–∞–Ω–∏—è —Å –ø–æ–≤—ã—à–µ–Ω–Ω—ã–º —É—Ä–æ–≤–Ω–µ–º –ø–æ–º–µ—Ö.
–ï—Å—Ç—å –ø—Ä–æ–º—ã—à–ª–µ–Ω–Ω—ã–µ –ø—Ä–µ–æ–±—Ä–∞–∑–æ–≤–∞—Ç–µ–ª–∏ RS485 –≤–æ —á—Ç–æ —É–≥–æ–¥–Ω–æ
–î–ª—è –ª–æ–¥–∫–∏ –º–æ–∂–Ω–æ –∏—Å–ø–æ–ª—å–∑–æ–≤–∞—Ç—å –¥–µ—à–µ–≤—ã–π —ç–∫–≤–∏–≤–∞–ª–µ–Ω—Ç
https://aliexpress.ru/item/100500356162 ... 3d62Ub98h4
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Ñ–µ–≤ 13, 2022 16:31:51
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–∞ —è –¥—É–º–∞–ª —á—Ç–æ –±—É–¥–µ—Ç —è—Ö—Ç–∞ —Å –∞–≤—Ç–æ–ø–∏–ª–æ—Ç–æ–º –∏ IP –∫–∞–º–µ—Ä–æ–π... —É–ø—Ä–∞–≤–ª–µ–Ω–∏–µ —Å –ü–ö –∏ —Ç–µ–ª–µ—Ñ–æ–Ω–∞ –ø–æ Wi-Fi –∏ Ethernet...
–í–ª–æ–∂–µ–Ω–∏–µ:
–Ø—Ö—Ç–∞.jpg [152.46 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 157
RS... —É—Å—Ç–∞—Ä–µ–ª–æ –Ω–µ–º–Ω–æ–≥–æ...
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
maxlab
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Ñ–µ–≤ 13, 2022 16:44:54
–ú—É—á–∏—Ç–µ–ª—å –º–∏–∫—Ä–æ—Å—Ö–µ–º
–ö–∞—Ä–º–∞: 4
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 44
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –∞–ø—Ä 23, 2013 22:21:18–°–æ–æ–±—â–µ–Ω–∏–π: 443–û—Ç–∫—É–¥–∞: KUBAN, Krasnodar
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–≠—Ç–æ –≤–∏—à–µ–Ω–∫–∞ –Ω–∞ —Ç–æ—Ä—Ç–µ
–ö–æ–≥–¥–∞ –æ—Å–Ω–æ–≤–Ω–∞—è –∏–Ω—Ñ—Ä–∞—Å—Ç—Ä—É–∫—Ç—É—Ä–∞ –±—É–¥–µ—Ç –≥–æ—Ç–æ–≤–∞, —Ç–æ–≥–¥–∞ –º–æ–∂–Ω–æ –±—É–¥–µ—Ç –ø–æ–¥—É–º–∞—Ç—å –æ –¥–∏—Å—Ç–∞–Ω—Ü–∏–æ–Ω–Ω–æ–º
—É–ø—Ä–∞–≤–ª–µ–Ω–∏–∏. –ö—Ä–æ–º–µ —Ç–æ–≥–æ, —ç—Ç—É –∏–Ω—Ñ—Ä–∞—Å—Ç—Ä—É–∫—Ç—É—Ä—É –Ω—É–∂–Ω–æ –±—É–¥–µ—Ç –æ–±–∫–∞—Ç–∞—Ç—å –≤ —Ä–µ–∞–ª—å–Ω—ã—Ö —É—Å–ª–æ–≤–∏—è—Ö. –¢.–µ. —ç—Ç–æ—Ç –ø—Ä–æ–µ–∫—Ç —É –º–µ–Ω—è –∫–∞–∫ –º–∏–Ω–∏–º—É–º
–Ω–∞ –≥–æ–¥-–ø–æ–ª—Ç–æ—Ä–∞. –ê —Ç–∞–º –≤–∏–¥–Ω–æ –±—É–¥–µ—Ç...
–ü—Ä–∞–∫—Ç–∏—á–µ—Å–∫–æ–µ –ø—Ä–∏–º–µ–Ω–µ–Ω–∏–µ —ç—Ç–æ–º—É –Ω–∞ –ª–æ–¥–∫–∞—Ö –µ—Å—Ç—å. –ù–∞–ø—Ä–∏–º–µ—Ä, —Å—Ç–æ–∏—Ç —Ç–≤–æ—è –∫—Ä–∞—Å–∞–≤–∏—Ü–∞ –Ω–∞ –º—É—Ä–∏–Ω–≥–µ –ø–æ—Å—Ä–µ–¥–∏ –±—É—Ö—Ç—ã... –ê —Ç—ã –Ω–∞ –±–µ—Ä–µ–≥—É.
–í–æ—Ç, —Å–±—Ä–æ—Å–∏—Ç—å –∫–æ–Ω–µ—Ü –∏ –ø–æ–¥–æ–π—Ç–∏ –∫ —É–¥–æ–±–Ω–æ–º—É –º–µ—Å—Ç—É –ø–æ—Å–∞–¥–∫–∏ –ª—é–¥–µ–π –∏—Å–ø–æ–ª—å–∑—É—è –ø—É–ª—å—Ç –î–£.
–ü—Ä–∞–≤–¥–∞, –æ–±—Ä–∞—Ç–Ω–∞—è –ø—Ä–æ—Ü–µ–¥—É—Ä–∞ –∑–∞—Ç—Ä—É–¥–Ω–∏—Ç–µ–ª—å–Ω–∞... –≠—Ç–æ –µ—â–µ –Ω–∞ –ª–æ–¥–∫—É –Ω–∞–¥–æ –º–∞–Ω–∏–ø—É–ª—è—Ç–æ—Ä —Ç–∏–ø–∞ Kuka –ø—Ä–∏–∫—Ä—É—Ç–∏—Ç—å —á—Ç–æ–±—ã –≤–µ—Ä–µ–≤–∫—É –æ—Ç
–º—É—Ä–∏–Ω–≥–∞ –∏–∑ –≤–æ–¥—ã –ø–æ–¥–æ–±—Ä–∞—Ç—å –∏ –∑–∞—Ñ–∏–∫—Å–∏—Ä–æ–≤–∞—Ç—å –≤ —Å—Ç–æ–ø–æ—Ä–µ
–í –∫–∞—á–µ—Å—Ç–≤–µ —Ä–∞–∑–≤–ª–µ–∫—É—Ö–∏
https://www.youtube.com/watch?v=bAdqazixuRY
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
roman.com
–ó–∞–≥–æ–ª–æ–≤–æ–∫ —Å–æ–æ–±—â–µ–Ω–∏—è: Re: –¢–µ—Ö–Ω–æ—è—Ö—Ç–∏–Ω–≥ —Å –ê—Ä–¥—É–∏–Ω–æ
–î–æ–±–∞–≤–ª–µ–Ω–æ: –í—Å —Ñ–µ–≤ 13, 2022 17:11:18
–ö–∞—Ä–º–∞: -1
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏–π: 86
–ó–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω: –í—Ç –º–∞—Ä 13, 2012 12:16:13–°–æ–æ–±—â–µ–Ω–∏–π: 8876–û—Ç–∫—É–¥–∞: .ru
–Ý–µ–π—Ç–∏–Ω–≥ —Å–æ–æ–±—â–µ–Ω–∏—è: 0
–í–ª–æ–∂–µ–Ω–∏–µ:
–Ø—Ö—Ç–∞.jpg [205.23 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 141
–¥–æ –±–µ—Ä–µ–≥–∞ Wi-Fi –Ω–µ –¥–æ–±—å—ë—Ç...
–ù–∞–¥–æ GSM –∏–ª–∏ LTE –∏–ª–∏ –ø—Ä–æ—Å—Ç–æ–π —Ä–∞–¥–∏–æ –º–æ–¥–µ–º...
–í–ª–æ–∂–µ–Ω–∏–µ:
–º–æ–¥–µ–º.jpg [34.82 KiB]
–°–∫–∞—á–∏–≤–∞–Ω–∏–π: 144
–í–µ—Ä–Ω—É—Ç—å—Å—è –Ω–∞–≤–µ—Ä—Ö
–°—Ç—Ä–∞–Ω–∏—Ü–∞ 2 –∏–∑ 5
[ –°–æ–æ–±—â–µ–Ω–∏–π: 97 ]
, , , ,
–ö—Ç–æ —Å–µ–π—á–∞—Å –Ω–∞ —Ñ–æ—Ä—É–º–µ
–°–µ–π—á–∞—Å —ç—Ç–æ—Ç —Ñ–æ—Ä—É–º –ø—Ä–æ—Å–º–∞—Ç—Ä–∏–≤–∞—é—Ç: –Ω–µ—Ç –∑–∞—Ä–µ–≥–∏—Å—Ç—Ä–∏—Ä–æ–≤–∞–Ω–Ω—ã—Ö –ø–æ–ª—å–∑–æ–≤–∞—Ç–µ–ª–µ–π –∏ –≥–æ—Å—Ç–∏: 14
–í—ã –Ω–µ –º–æ–∂–µ—Ç–µ –Ω–∞—á–∏–Ω–∞—Ç—å —Ç–µ–º—ã–Ω–µ –º–æ–∂–µ—Ç–µ –æ—Ç–≤–µ—á–∞—Ç—å –Ω–∞ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —Ä–µ–¥–∞–∫—Ç–∏—Ä–æ–≤–∞—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ —É–¥–∞–ª—è—Ç—å —Å–≤–æ–∏ —Å–æ–æ–±—â–µ–Ω–∏—è–Ω–µ –º–æ–∂–µ—Ç–µ –¥–æ–±–∞–≤–ª—è—Ç—å –≤–ª–æ–∂–µ–Ω–∏—è